考虑通信拓扑切换的多导弹协同制导研究
作者: 张世强 李群生 何金刚
摘 要: 针对通信拓扑切换下多导弹协同打击问题, 提出了一种基于切换策略的时空协同制导律。 针对时间约束, 结合一致性算法设计分布式制导律, 并基于李雅普诺夫理论证明系统在有限时间收敛, 可以实现同时打击。 对于空间约束, 采用弹道成型制导律使各导弹收敛到期望的视线角。 设计切换策略, 使得导弹能够同时实现时间和角度协同攻击。 仿真分析验证了所设计制导律能在切换拓扑条件下和弹群失去1枚导弹的情况下实现齐射攻击和角度约束。
关键词: 协同制导; 切换拓扑; 时间约束; 角度约束; 制导律; 速度不可控
中图分类号: TJ765; V249
文献标识码: A
文章编号: 1673-5048(2024)01-0038-07
DOI: 10.12132/ISSN.1673-5048.2023.0099
0 引 言
随着各种军事新技术不断出现, 导弹与目标的攻防越来越复杂。 无论是“近防炮”和“定向能激光武器”, 还是各种干扰设备的出现, 都对导弹的发展提出了越来越高的要求。 因此, 建立多导弹协同攻击体系, 实现多导弹协同攻击, 是应对未来战争的重要技术手段, 可以有效提升导弹在强对抗环境下的快速突防和目标毁伤能力。
现有文献中, 针对协同制导的研究主要从时间约束和角度约束出发。 其中时间约束是协同制导律的前提, 主要是满足多导弹齐射攻击的要求。 时间协同制导律有指定攻击时间的协同制导律, 这种制导律的各导弹之间没有通信交流。 文献[1]将比例导引法与最优控制结合, 设计了一种比例导引法加时间偏置项的协同制导律。 文献[2]根据非线性方程, 提出一种具有更严格形式的协同时间制导律。 文献[3]针对指定攻击时间和非线性模型, 提出一种基于滑膜控制的时间协同制导律, 避免了奇异现象。 但是, 战场情况瞬息万变, 很难选择合理的攻击时间, 而一旦攻击时间的选择不合适, 整个多导弹制导系统就很难收敛, 从而无法实现协同攻击。 多导弹之间通过信息交流实现协同攻击是解决指定攻击时间选择困难的有效途径。 文献[4]提出一种领从式的时间协同制导律, 并且推广到速度不同的情况。 文献[5]同样基于领从式架构设计协同制导律, 其中领弹和从弹分别设计滑模制导律, 可以对非机动目标实现协同打击。 文献[6]提出一种以比例导引法为基础, 导航比时变的协同制导律, 通过减少多导弹剩余时间之间的一致性误差, 达到齐射攻击。 文献[7]结合非线性滑模控制和一致性理论, 提出一种非奇异的协同制导律, 可以实现在大前置角初始条件下, 多导弹协同攻击地面静止目标。 角度约束是指导弹以一定的空间构型命中目标, 能有效对抗高防护目标, 提高对高价值目标的毁伤效果。 文献[8]提出一种落角约束的偏置比例导引律, 通过时变增益调节各导弹的剩余飞行时间, 通过偏置项控制落角。 文献[9-11]结合多智能体一致性和滑模控制理论, 将制导律的设计分为视线法向和视线切向, 实现导弹对目标的时空约束打击。 但要求导弹全程轴向速度可控, 实际应用难度较大。
现有关于协同制导的研究中, 均是假设各飞行器之间的通信处于理想条件下, 通信拓扑固定。 在实际作战中, 由于部分导弹被击落、 通信设备限制、 障碍物遮挡和电磁干扰等影响, 导弹之间的通信不是固定的, 弹群的通信拓扑可能会切换, 这种情况不仅会降低多导弹系统的协同性能, 甚至破坏协同的效果, 造成整个制导系统发散。 因此, 需要所设计的时间协同制导律对切换通信拓扑具有一定的容错能力。 文献[12-13]提出一种分布式切换拓扑的协同制导律, 可以实现对目标的齐射攻击, 但没有实现角度协同。 文献[14]采用一阶多智能体一致性理论, 针对通信拓扑切换的情况设计了一种协同制导律, 可以实现时间的协同。
综上所述, 现有的多导弹协同制导律设计大多数基于通信实时交流的假设, 并且在面对通信拓扑切换的制导律设计中, 所关注的主要是时间约束问题, 缺少空间中的协同, 因此, 实现速度不可控导弹时间和空间的协同仍是需要解决的问题。 本文提出了一种切换的时空协同制导律, 在通信拓扑切换的情况下, 各导弹的剩余飞行时间收敛一致, 并且末端视线角收敛到各自的期望值。
1 问题描述
1.1 协同攻击模型
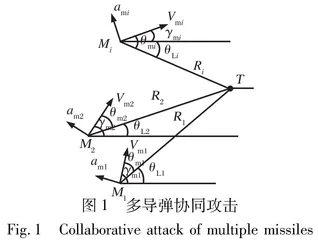
考虑平面攻击场景, 相对几何关系如图1所示。 假设导弹的导引头和自动驾驶环节时间常数小, 可以忽略不计, 导弹的速度大小不变。
图中, T和Mi分别表示目标和第i枚导弹; Ri为目标和导弹之间的相对距离; Vmi为导弹的速度; γmi为目标和导弹的弹道倾角, θmi为导弹的前置角, θLi为视线角。 则制导模型的运动学方程如下:
1.2 图 论
目前导弹间的通信拓扑一般使用图论来描述, 本文多导弹之间使用无向图G(υ, ζ, A)描述。 其中, υ表示节点集合, ζ表示边的集合, A=[aij]表示临接矩阵。 若图G是无向图, 则aij=aji。 定义图G的拉普拉斯矩阵为L=[lij]N×N, 假如导弹之间可以相互传递信息, 则aij>0, 反之aij=0。 其中:
引理1[15]: 若x1, x2, …, xn≥0且0<μ<1, 则如下不等式成立:
引理2[16]: 如果图G是无向且连通的, 则对任意ξ=[ξ1,ξ2,…,ξn]T∈Rn且满足1Tξ=0, 都有ξTLξ≥λ2(L)ξTξ, 其中, 1=[1, 1, …, 1]T。
引理3[17]: 如果图G是无向且连通的, λ2(L)是L的第二小的特征值, 则有λ2(L)>0。
式中: β和p是正常数, 且p∈(0, 1), 则可知系统状态能在有限时间内收敛到平衡点且收敛时间满足
1.3 设计目标
为了实现多导弹在通信拓扑切换情况下的时空协同, 应该使各导弹之间的剩余飞行时间趋于一致, 但剩余飞行时间很难得到, 所以选择预测剩余飞行时间t^goi作
为协调变量, 因此协同制导律的目标为
式中: θfi为期望的视线角。
2 多导弹协同制导律设计
2.1 时间制导律设计
本节的设计目标是在导弹通信无向且切换的条件下使所有导弹的剩余飞行时间收敛到一致。
定义导弹预测飞行时间为[6]
设预测攻击时间为
假设每枚导弹的视场角绝对值为小量, 则可以得到如下近似:
对式(11)求导并将式(12)带入可得协同制导模型:
受文献[12-14]的启发, 设计如下制导律:
式中: 0<α<1; sig(x)α=sgn(x)xα。 只要当通信拓扑无向, 并且整个制导过程的总连通时间大于Tc, 则式(14)的制导律可以使多导弹的剩余时间在有限时间内收敛:
证明: 将式(14)代入式(13)可得
因为通信拓扑始终是无向的, 则有
由式(17)可得
令
其中:
由式(18)~(20)可得
由式(16)可得
选择Lyapunov函数如下:
对式(24)求导, 并将式(22)~(23)代入可得
由式(25)可知系统渐进稳定。 当系统通信拓扑在某个时间段处于固定且联通的状态:
由引理1可知:
设B=[a2/(1+α)ij]∈Rn×n, δ(t)=[δ1(t), δ2(t), …, δn(t)],
由式(22)可得
1Tδ=0(28)
由引理2可得
由引理2和引理3可得
式中: L(B)为图G(B)的拉普拉斯矩阵; λ2[L(B)]为第二小的特征值。
在系统通信拓扑无向且连通下所对应的整个时间区间内, 令K1=λ2[L(B)]>0, 则
由引理4可得
其中:
由式(33)和式(19)可得
集合式(35)和式(11), 在通信无向且连通并且总联通时间大于T1时, 多导弹的剩余飞行时间趋于一致:
当弹群因为电磁干扰或其中1枚导弹被击落导致弹群通信拓扑变换时, 由式(24)~(25)可知系统全局渐进稳定, 此时的弹群制导系统仍可以保持稳定。 对于新组成的通信拓扑, 只要制导律(14)满足要求, 则仍然可以同时命中目标, 实现协同打击。
2.2 时间角度协同制导律
为了增加毁伤效果和突防能力, 提高对隐身目标的探测能力, 在导弹同时攻击目标的基础上设计角度制导律, 使多导弹同时收敛到期望的视线角。 角度控制制导律可以选用弹道成型制导律[19], 导弹成型制导律不受导弹通信的影响:
式中: θLfi为期望视线角。
算法流程如图2所示。
综上, 整体制导律设计为: 估算各导弹的剩余飞行时间, 并计算剩余飞行时间之差, 当最大剩余飞行之差大于允许误差时, 制导律切换为时间制导律, 当满足时间约束后, 制导律切换为角度制导律:
其中: ε1, ε2为允许误差; emax为最大剩余飞行时间之差。 定义sgn1(x)=1, x<0; sgn1(x)=0, x>0; sgn2(x)=0, x<0; sgn2(x)=1, x>0。 当最大剩余飞行之差大于ε1, 采用时间协同制导律; 当最大剩余飞行之差小于ε2, 采用角度制导律; 当最大剩余飞行之差在ε1和ε2之间时, 制导律保持不变; ε1和ε2的滞后减少了制导律的震荡。
3 仿真验证
对所设计的时空协同制导律进行仿真验证。 设置仿真场景为4枚导弹在满足空间约束的情况下协同拦截1个固定目标, 仿真参数和指标设置如表1所示, 通信拓扑回路如图3所示, 其中每2 s拓扑切换一次, 为了更符合实际情况, 限制导弹法向过载30g, 导弹视场角假设为前置角。 在切换拓扑图3的情况下, 方法A采用本文所设计的制导律式(38), 制导参数选择N=3.5, α=0.64, ε1=1, ε2=0.6。 方法B采用文献[14]提出的制导律, 参数选择N=3, α=0.6。
每个拓扑结构所对应的临接矩阵为
仿真结果如图4~10所示。 其中, 脱靶量和制导时间如表2所示。
由图4~10和表2可知, 在切换拓扑情况下, 两种制导律都能使4枚导弹成功命中目标。 由图8和表2可知, 方法A的各导弹的剩余时间误差在0.5 s以内, 最大脱靶量2.27 m, 方法B的剩余时间误差0.1 s, 最大脱靶量2.49 m, 两者性能接近。 但由图5可知, 与方法B相比, 方法A的导弹过载除了最开始1 s内的震荡, 其余时间相对平缓。 由图9~10可知, 两种方法下导引头视场角都在绝对值40°内变化, 但方法A的视场角速度平缓, 可以提高导弹的打击精度。 由图6可知, 方法A的导弹视线角都收敛到期望值, 且视线角误差在0.1°以内, 从而验证了所设计二维时空约束协同制导律的有效性。
设其中1枚导弹中途被击落, 通信拓扑变化如图11所示。 1枚导弹被击落的时间设置为18 s, 制导参数选择N=3.5, α=0.58, ε1=1, ε2=0.6, 导弹初始条件不变。