光电成像导引头机理和数据融合建模方法
作者: 肖文健 王彦斌 周含冰 张德锋 蒋成龙 周旋风
摘 要: 全数字仿真在光电成像制导武器设计研制、 试验鉴定乃至作战训练中都扮演着十分重要的角色。 为了解决当前光电成像制导武器全数字仿真试验中缺少导引头数学模型的难题, 本文依据数字孪生思想, 提出了一种机理与数据融合的光电成像导引头建模方法。 以典型红外成像导引头为例, 基于红外探测识别的基本原理构建了其探测识别过程的机理模型, 然后基于红外成像导引头在不同工作场景下的实测数据集, 构建了其制导指令数据模型, 最后基于该“机理+数据”融合模型, 开展了针对固定目标和运动目标两种典型作战场景不同干扰条件下的全数字仿真试验。 试验结果表明, 机理和数据融合模型能够比较真实地反映红外成像导引头在复杂对抗场景下的性能特征。
关键词: 光电成像制导; 导引头; 机理模型; 数据模型; 融合模型; 全数字仿真; 制导武器
中图分类号: TJ765; TP183
文献标识码: A
文章编号: 1673-5048(2024)03-0101-08
DOI: 10.12132/ISSN.1673-5048.2023.0179
引用格式: 肖文健, 王彦斌, 周含冰, 等 . 光电成像导引头机理和数据融合建模方法[ J]. 航空兵器, 2024, 31( 3): 101-108.
Xiao Wenjian,Wang Yanbin, Zhou Hanbing, et al. A Modeling Approach of Mechanism and Data Fusion for Electro-Optical Imaging Seeker[ J]. Aero Weaponry, 2024, 31( 3): 101-108.( in Chinese)
0 引 言
以电视制导和红外成像制导等为代表的光电成像制导武器, 因具有打击精度高、 抗电子干扰能力强以及易实现毁伤效果评估等优点, 是当前夺取战场信息优势、 实施精确打击的重要手段, 在对地对海、 防空反导、 空间攻防等领域得到广泛应用[1-3]。 然而, 战场上云、 雨、 雪、 雾等复杂气象条件以及激光、 烟幕、 假目标等复杂人为干扰手段, 都将严重制约光电成像制导武器效能的发挥。 如何准确评估光电成像制导武器的复杂环境适应能力和抗干扰能力已经成为亟待解决的技术难题[4]。 导引头是光电成像制导武器的“眼睛”, 同时也是作战场景中各类光电对抗武器的首要“目标”, 其性能直接决定了红外成像制导武器的作战效能。 因此, 在复杂场景下体系作战全数字仿真试验中, 导引头模型是非常关键的一部分, 该模型的逼真度将直接决定全数字仿真试验结果的可信度。
从仿真建模角度,通常有两种方法可表征红外成像制导系统: 参数法和图像流法, 相应的模型也可称为功能级模型和信号级模型[5-8]。 在功能级模型中, 导引头的性能由一组包含目标、 背景、 传输效应等要素的数学公式或传递函数集来表示, 其反映了导引头的平均探测跟踪能力。 信号级模型包含了导引头所成图像及其图像处理算法和目标跟踪算法等细节。 功能级模型和信号级模型都有各自显著的应用特点, 其中信号级模型因其包含有场景图像处理细节而更适用于导引头单体图像处理算法、 抗干扰算法的开发和验证, 功能级模型因其运行效率高而更适用于体系对抗条件下包含多种装备模型的大规模仿真。 然而, 目前在实战对抗背景下的光电成像制导武器全数字仿真试验中, 普遍面临着无合适导引头数学模型可用的难题, 主要体现在两个方面: (1)导引头相关技术和算法的研发通常基于装备实体进行, 很少同步构建该型导引头的信号级模型, 并且信号级模型受到运行效率的限制也很难用于体系对抗全数字仿真。 (2)功能级模型只能根据相关参数指标反映导引头在一般情况下的探测跟踪能力, 难以对动态对抗条件下的探测跟踪能力, 尤其是在受到干扰条件下的性能进行模拟。
为了建立能够逼真反映动态对抗条件下光电成像导引头性能的功能级模型, 本文将白箱建模与黑箱建模有机结合, 研究了光电成像导引头机理和数据融合建模方法, 并以某红外成像导引头建模仿真为例, 验证了该“机理+数据”建模方法的可行性和有效性。
收稿日期: 2023-09-15
基金项目: 国家自然科学基金项目(11904398)
*作者简介: 肖文健(1989-), 男, 河北张家口人, 博士, 助理研究员。
1 光电成像导引头建模方法
1.1 工作原理分析
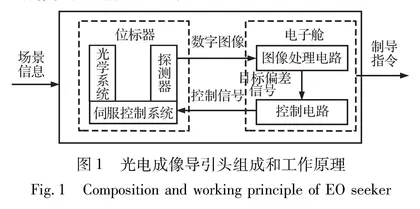
不论是电视导引头还是红外成像导引头, 其结构组成和工作原理总体相似, 主要由位标器和电子舱两部分组成, 如图1所示[9-11]。
位标器包括光学系统、 光电探测器和伺服控制系统, 其中, 光学系统用来收集目标、 背景及干扰的辐射或反射信息, 汇聚在探测器上; 探测器将光信息转换成电信号, 再量化成灰度值, 最后按照工作帧频向电子舱输入数字灰度图像。 电子舱主要包括图像处理电路和控制电路。 图像处理电路基于预先写入的图像处理算法对包含目标、 背景以及干扰的场景图像进行处理, 从中探测识别出目标, 并计算得到光轴指向与弹目视线的夹角、 弹目视线角速度; 光轴指向与弹目视线的夹角作为控制电路的输入, 基于预先写入的伺服控制算法形成驱动信号, 实现对光轴指向的调节, 最终光轴指向目标。 弹目视线角速度即是制导武器利用制导律生成弹道的制导指令。
1.2 机理和数据融合建模
从光电成像导引头的工作原理分析, 其包括四个核心功能: 探测目标、 识别目标、 跟踪目标和产生制导指令。 其中, 跟踪目标功能是在导引头探测识别到目标后, 基于跟踪算法逐渐减小光轴指向与弹目视线的夹角, 直到光轴指向目标。 由于不同类型的导引头, 伺服跟踪算法也不相同, 但最终均是实现光轴指向目标, 因此功能级模型可忽略该过程, 简化为探测到目标随即跟踪目标。 光电成像导引头“机理+数据”模型结构如图2所示。
光电成像导引头建模的过程就是对其工作原理进行深入理解与归纳的过程。 其目标探测和目标识别过程的物理机理比较清晰, 而且对于不同类型导引头的工作机理总体相似, 因此可以采用机理建模的方式建立一个通用的数学模型, 从时域、 空域、 频域及能量域等角度, 分别推导建立光电成像导引头目标探测和目标识别的机理模型。 在此基础上, 通过制导指令生成模型计算制导指令。 在制导指令生成模型中, 制导指令的理论值可通过导弹和目标实时的相对位置关系计算得到, 而在实际情况下, 导引头输出的制导指令还应包含制导误差。 该误差对于不同类型导引头以及在不同工作场景下均不相同, 难以从机理角度对其建立一个通用而准确的数学模型。 另外, 光电成像导引头在战场上往往要面临复杂的作战场景, 其中不仅包含变幻多端的自然环境, 还要接受激光、 烟幕及假目标等各种人为干扰。 在这种复杂作战场景下光电成像导引头制导指令的输出规律则更加难以从机理角度进行建模。
考虑到不论是制导误差还是人为干扰造成的制导指令偏差, 其最终结果都体现在输出制导指令与理论值的偏差上, 因此本文将其统一为制导误差进行数据统计建模。 数据统计建模方法不用从机理上追求对导引头制导指令生成过程的完整复现, 其具体实现原理是针对导引头在特定作战场景的建模需求, 以导引头制导误差作为模型的输出参数, 利用外场试验数据或半实物仿真试验数据, 通过数据分析筛选出对制导误差影响较大的要素参数, 作为模型的输入参数, 然后采集输入参数不同取值时的输出参数实测结果, 通过数据拟合方法对实测数据进行建模, 以拟合公式的形式构建制导误差模型输入与输出之间的映射关系, 从而构建出导引头制导误差数据统计模型。
综上所述, 本文光电成像导引头数学模型采用“机理+数据”的结构, 在目标探测和识别阶段采用机理建模的方式, 而在最终制导指令生成阶段采用数据统计建模的方式, 充分发挥机理建模透明度高、 通用性强和数据建模灵活性强、 逼真度高的优势, 实现二者有机融合。
2 典型红外成像导引头建模实例
2.1 目标探测识别机理建模
红外成像导引头对于目标实现有效探测和识别, 根据图像处理技术和经验, 需要同时满足以下三个条件: (1)目标处于红外成像导引头的视场范围内; (2)弹目距离小于导引头对于目标的最大探测距离; (3)目标在红外探测器上的成像尺寸满足目标识别要求。
2.1.1 视场条件判断
先计算弹目视线与光轴指向的夹角, 如图3所示。 再与导引头半视场角进行比较判断, 由目标的经纬高(LT, BT, HT)和导弹的经纬高(LM, BM, HM), 按照地理经纬度、 高度与地心坐标系的变换关系, 分别转化为地心坐标系中的目标位置(XT, YT, ZT)和导弹位置(XM, YM, ZM)。 其中, 地理经纬高与地心坐标系的变换关系为
X=(Rn+H)cosBcosLY=(Rn+H)cosBsinLZ=[Rn(1-e)2+H]sinB (1)
式中: e为椭圆第一偏心率; Rn为卯酉圈曲率半径。
以弹体为原点, 构建与地心坐标系平行的三维直角坐标系, 则目标在弹体坐标系中的坐标变为(XT-XM, YT-YM, ZT-ZM)。 假设光轴指向与三个坐标轴的夹角分别为φx, φy, φz, 由空间向量夹角计算公式得
cosθ=a·ba·b=(XT-XM)cosφx+(YT-YM)cosφy+(ZT-ZM)cosφz(XT-XM)2+(YT-YM)2+(ZT-ZM)2cos2φx+cos2φy+cos2φz(2)
仿真过程中, 实时计算弹目视线与光轴指向的夹角θ, 如果θ小于导引头视场角的一半, 则认为目标处于导引头的视场中, 满足第一个条件。
2.1.2 目标最大探测距离计算
对于红外探测距离建模研究, 主要包括最小可探测温差(MDTD)、 最小可分辨温差(MRTD)和噪声等效功率(NEP)等。 其中MDTD模型主要用于点目标探测距离计算, MRTD模型主要用于扩展目标探测距离计算, 而在系统信噪比(SNR)较小时, 选用NEP模型计算会更准确[12]。 考虑到红外成像导引头工作场景复杂多变, 本文基于NEP模型计算目标最大探测距离。
NEP模型是根据红外辐射由目标到红外探测系统的传输过程计算信噪比(SNR)。 导引头能够探测到目标, 就要求SNR能够保证其可靠探测的同时减少由噪声引起的虚警。 将该SNR的最小值表示为SNR0, 其对应的弹目距离即为目标最大探测距离。
忽略目标反射其他辐射前提下, 传统基于NEP模型的信噪比计算公式为[13]
SNR=(MT-MB)ATD2oτoe-αR4NEP·R2(3)
式中: MT和MB分别为目标和背景的辐射出射度; AT为目标面积; Do为光学系统直径; τo为光学系统衰减系数; α为大气衰减系数; R为弹目距离。
通常情况下, 式(3)对于均匀背景下的点目标是有效的, 但没有考虑焦平面阵列(FPA)结构及其对成像的影响。 而红外成像导引头由远及近飞向目标, 当弹目距离较远时, 目标在导引头探测器成像为一个点; 当弹目距离增大时, 目标在导引头探测器成像逐渐变大, 当目标在导引头探测器成像范围大于一个像素时, 式(3)显然是无效的, 因为目标的能量分布在多个像素上, 而探测所需的信噪比仅从单个像素获取。 因此本文对传统NEP模型进行了改进。