直接力/气动力复合控制技术发展综述
作者: 郭建国 彭谦 周敏
摘 要:直接力/气动力复合控制的本质是利用直接力响应速度快的特性提升被控飞行器的机动性和快速性,能够有效补偿气动力不足导致的气动力控制响应慢问题。 本文阐述了直接力/气动力复合控制系统的特性及关键问题,从发动机配置方式、国内外直接力建模研究现状、以及直接力控制干扰建模三方面介绍了直接力/气动力复合控制系统建模方法,从控制方式、国内外直接力/气动力复合控制研究现状、以及脉冲发动机点火算法三方面介绍了直接力/气动力复合控制方法,给出了可行的发动机复合系统稳定性分析方法,对直接力/气动力复合控制未来的发展趋势进行了展望,并对其关键技术进行了总结。
关键词:直接力;气动力;制导控制系统;直接侧向力;控制分配;脉冲发动机;点火算法
中图分类号:TJ760;V249.1 文献标识码: A 文章编号:1673-5048(2022)01-0001-13[SQ0]
0 引 言
直接力控制利用发动机喷气的反作用力产生推力,作用于被控对象从而实现控制任务,具有响应速度快、不受大气环境影响的特性,适用于临近空间、大气层外等飞行环境[1]。 直接力/气动力复合控制指直接力控制与气动力控制复合或多种直接力复合的控制方法,本质上是一种多执行机构组合协调控制系统,利用直接力控制的快速响应能力补偿气动力不足导致的气动力控制响应慢问题,进而提高控制精度。
在气动力不足的场景下,引入直接力控制能显著提升其被控对象性能。 直接力控制有直接侧向力控制和推力矢量控制两种。 直接侧向力控制,又称为反作用喷流控制,通过点燃侧向脉冲发动机产生侧向推力提供加速度或额外的力矩增量,可以有效地提高可用过载,减小响应时间,改善飞行末段控制性能,是一种成熟可靠的控制方式[2-4]。 推力矢量控制通过控制发动机推力相对弹轴的方向来产生机动飞行所需的控制力矩[5]。 由直接力控制产生的力/力矩增量与被控对象的飞行高度、速度均无关,大大提高了被控对象的机动性和快速性。
直接力/气动力复合控制方法的提出与研究具有很强的工程应用价值。 随着飞行器性能的不断提升,防空系统面临的威胁也在不断升级,从飞机类目标转向飞行速度更快、机动能力更强、威胁更大的目标,如弹道导弹、巡航导弹和高超声速飞行器等[6-8]。 传统拦截器采用纯气动的控制方式,调整舵偏转产生操纵力矩,控制其所受气动力,实现拦截器飞行控制。 气动控制在稠密大气环境中响应时间一般大于0.1 s;若在拦截末段飞行高度高、大气稀薄的环境下,气动控制的响应时间一般大于1 s,此时,纯气动控制不能及时响应制导指令,从而导致拦截失败[2, 7, 9-11]。 另一方面,破片杀伤式战斗部的破片质量太小,即使成功命中,也不能对目标造成有效打击[12]。 碰撞毁伤利用拦截弹与目标在高速碰撞中产生的动能进行毁伤,杀伤能力显著强于传统的破片杀伤[13],需要拦截器快速响应指令, 并精准碰撞目标关键部位。 直接力控制的响应时间一般为6~10 ms,且不受大气环境密度变化影响[14-16]。 因此,提出了直接力/气动力复合控制技术,将其作为在气动力不足环境中工作的飞行器的控制核心。
直接力/气动力复合控制技术被广泛应用于气动力不足的场景中,如防空反导系统中的拦截器和需要再入飞行的可重复使用飞行器。 典型型号有美国的拦截器PAC-3, THAAD, 可重复使用飞行器X-37B;俄罗斯的拦截器S-400系列中的9M96E/E2; 法国、意大利联合研制的Aster-15/30等。 PAC-3采用姿控复合控制,在弹体前部加装姿控发动机配合自旋来增强机动能力,主要用于对高度在40 km以下的弹道导弹飞行末段进行拦截[17];为了填补PAC-3拦截高度低的缺点,美国研发了姿轨控复合控制的THAAD导弹,采用轴对称无翼无舵的设计,可拦截高度范围为40~150 km[18]。 美国X-37B采用了翼身融合的升力体气动布局,运行轨道高度为约400 km的低地球轨道[19],其复合控制系统包含气动舵面、反作用控制系统和轨道机动系统,前后RCS共28个,其喷口大小和气流方向都有特别设计,相较于拦截器更为复杂[20]。 俄罗斯S-400系列中的9M96E/E2导弹采用轨控复合控制,在导弹质心加装微型喷管轨控发动机,快速修偏能力强[21]。
本文分析了直接力/气动力复合控制特性及关键问题,介绍了直接力/气动力复合控制系统建模方法、稳定性分析方法及控制方法,并在此基础上展望了直接力/气动力复合控制技术未来的相关研究及发展方向。
1 直接力/气动力复合控制特性及关键问题
直接力/气动力复合控制(简称直/气复合控制)本质上是一种多执行机构协调控制系统,适用于对系统响应速度、机动能力有较高要求的各种应用场景,特性如下:
(1) 多输入的多执行机构组合系统
直/气复合控制至少有两种控制量,属于多输入系统。 以直接侧向力/气动力复合控制拦截器为例,控制系统的执行机构为气动舵和姿/轨控脉冲发动机,输入控制量为舵偏角和脉冲发动机的开关序列。
(2) 直接力执行机构存在控制受限问题
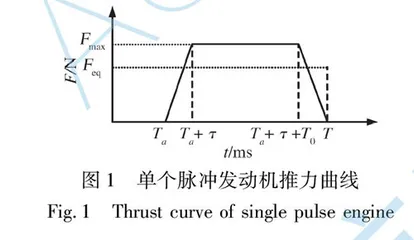
提供直接力控制量的执行机构以脉冲发动机最为常见。 脉冲发动机的基本工作曲线如图1所示。
由图可以看出,脉冲发动机属于离散控制,可能具有工作时间受限、推力大小受限等控制受限问题;结合实际工程应用,脉冲发动机还存在安装位置受限、使用次数受限、不可重复使用等控制受限问题。
(3) 异类执行机构协调控制
气动舵的控制输入为舵偏角,可以在一定范围内连续变化,属于连续控制执行机构;脉冲发动机的控制输入为脉冲发动机的开关序列,属于离散控制执行机构;另一方面,姿/轨控发动机复合控制也会因发动机工作特性不同,同时存在连续控制量与离散控制量。 因此,直/气复合控制系统中往往存在连续/离散控制量耦合,在其控制系统设计中需要协调异类执行机构。
(4) 存在力/力矩强耦合
力矩控制量影响被控对象的姿态,而力控制量影响被控对象的运动轨迹。 气动力控制量通过提供力矩增量调整被控对象姿态,从而实现进一步的控制;直接力控制量根据执行机构的配置位置可以提供力/力矩两种控制量,甚至同时提供力/力矩两种控制量。
由于以上特性,直/气复合控制系统研究中存在以下关键问题:
(1) 执行机构工作特性复杂,建模困难;
(2) 控制形式多样,执行机构选择困难;
(3) 同时存在多种异类控制量且控制受限,设计协调控制方法并尽可能发挥复合控制性能;
(4) 耦合问题严重,稳定性分析难;
(5) 执行机构间互相影响,干扰复杂;
(6) 力/力矩控制量强耦合,导致制导控制系统耦合。
现有研究在直/气复合控制系统建模、复合控制方法设计方面有较多的成果,在复合控制系统稳定性分析、制导控制系统耦合等方面缺乏研究。
2 姿/轨控发动机配置及建模
气动力控制指通过调整气动舵产生额外力矩改变导弹姿态,从而改变其气动力的传统控制方式。 气动力控制是一种很成熟的控制方法,本节主要以复合控制拦截器为例,从发动机配置方式、直接力建模方法国内外研究现状及控制干扰三方面介绍直接侧向力在复合控制系统中的建模方法。
2.1 姿/轨控发动机配置方式
侧喷脉冲发动机是提供直接侧向力应用最广泛的执行机构,具有开关性质[22],点火后能够快速产生直接侧向推力,但存在严重的控制受限问题,如工作时间受限、推力大小受限、安装位置受限、使用次数有限、不可重复使用等。
根据脉冲发动机的安装位置,直接侧向力控制又分为姿态控制与轨道控制两种。
(1) 姿态控制通过安装在相对质心一定距离的侧喷发动机提供直接力产生转动力矩,快速改变导弹姿态,最后依靠气动力来产生过载。 姿控脉冲发动机可安装在质心前或质心后。 若姿控装置安装在质心前,在其作用下由弹体姿态产生的气动过载与姿控直接力方向相同,控制效率更高;若姿控装置安装在质心后,在其作用下由弹体姿态产生的气动过载与姿控直接力方向相反,控制效率会被抵消一部分,但对流场影响更小[23]。 实际工程应用中,姿控装置大多安装在质心前。
(2) 轨道控制通过安装在质心附近的侧喷发动机提供直接力形成横向推力,快速改变导弹加速度且不受气动环境影响,可直接使质心移动,从而实现机动。
无论姿控还是轨控,直接侧向力都由垂直于弹体轴线径向的侧喷发动机提供。 以直/气复合控制拦截器为例,气动舵、姿控发动机、轨控发动机在弹体上的典型分布如图2所示,有xp>xG>xz。
建模方法与配置紧密相关。 基于执行机构组合的直/气复合控制典型配置方式有以下几种:
(1) 姿/轨控发动机复合控制
姿/轨控发动机复合控制方式受气动环境影响小,适用于大气稀薄环境或真空环境中。 姿/轨控脉冲发动机复合控制的典型配置是分通道控制,如大气层外杀伤飞行体(EKV)。
姿/轨控发动机复合控制执行机构配置方式如图3所示。 喷口2和5负责偏航通道控制,喷口1+4组合、3+6组合负责俯仰通道控制,喷口1+6组合、3+4组合负责滚转通道控制,各喷口共用同一个燃烧室,姿控脉冲发动机可提供的直接力总冲固定,但各喷口的工作时间可以通过喷口的开关调整。 轨控脉冲发动机的喷口1和3负责偏航通道运动,喷口2和4负责俯仰通道运动,其工作时间可调、推力大小可调。
(2) 姿控/气动舵复合控制
姿控/气动舵复合控制配置方式根据被控对象飞行方式,可分为滚转与不滚转两种。
飞行器滚转会造成俯仰/偏航通道的严重耦合,发动机喷口位置随着弹体滚转而变化,可提供的直接侧向力方向更灵活,但脉冲发动机的点火策略设计复杂。 姿控/气动舵复合控制的姿控脉冲发动机配置如图4所示,侧喷脉冲发动机喷口位置固定,数圈脉冲发动机喷口交错分布,各喷口可提供一次脉冲推力。
对于不滚转飞行器,各通道控制可解耦,脉冲发动机配置及点火策略设计相对简单,但需要设计控制器保证拦截器的滚转通道稳定。 不滚转姿控/气动舵复合控制的典型配置是美国X-37B飞行器,如图5所示,其反作用控制系统(RCS)安装在飞行器后体,气喷口大小和方向根据辅助配平和控制需求进行了特别设计[20]。
(3) 轨控/气动舵复合控制
轨控/气动舵复合控制用于对飞行轨迹进行快速修偏,典型型号是法国Aster-15/30[13, 27],其轨控发动机在飞行器质心位置均匀分布4个喷口,与图3中的轨控发动机分布类似。
2.2 直接力建模研究现状
气动舵属于连续的执行机构,建模方式很成熟。 对于复合系统中的直接力控制量,现有研究采用了不同的描述方法。
直接力模型建立在拦截器运动学/动力学模型的基础上,对于滚转拦截器,则采用准坐标系下的运动学/动力学模型[28]。 在建立直接力控制的数学模型前,首先明确其执行机构特性。 脉冲发动机燃料有固体和液体两种,固体脉冲发动机工作时间固定、推力固定;而液体脉冲发动机可通过控制液体燃料的流量随意控制发动机的开启和关闭,使推力大小精确可调[23]。 这里主要阐述直/气复合控制系统建模研究中主流的几种直接力建模方法。
由于发动机结构、燃料等不同,其产生的推力有连续可调或大小固定两种作用形式,推力大小固定的情况下又分为脉冲宽度可调或固定。 脉冲宽度可调的直接力执行机构便于验证一些控制方法的应用,但是从加工工艺和实际应用的角度看,脉冲宽度固定的发动机占有一定的优势[29]。 研究者根据需求基于以下几类直接力工作方式建模。