雷达地面目标识别技术现状与展望
作者: 郭鹏程 王晶晶 杨龙顺
摘 要: 雷达地面目标识别技术是空地导弹雷达导引头智能化和信息化的重要技术支撑手段。近年来,学者们对地面目标识别技术做了大量研究,但是随着现代化战争攻防对抗日益激烈,雷达地面目标识别技术的应用面临着诸多问题,成为长期制约精确制导武器发展的瓶颈因素。为了更好地使相关雷达从业者了解该领域的研究现状和未来的发展趋势,本文介绍了雷达目标识别技术的概念,总结了面向装备应用雷达地面目标识别存在的技术难点,对国内外研究现状进行了概括,最后对该技术的发展趋势进行了展望。
关键词: 雷达地面目标识别; 精确制导; 噪声稳健; 杂波稳健; 小样本; 群目标; 空地导弹
中图分类号: TJ760; TN95
文献标识码: A文章编号: 1673-5048(2022)02-0001-12
DOI:10.12132/ISSN.1673-5048.2022.0012
1 雷达目标识别技术介绍
现代化战争具有突发性、快速性、战场环境复杂的特点,对高技术型武器的信息化和智能化要求越来越高[1-3]。相比于激光、红外等其他探测装置,雷达不受环境状况的约束,具有全天时、全天候和远距离探测目标的能力,在导弹精确制导领域具有重要的应用[4]。
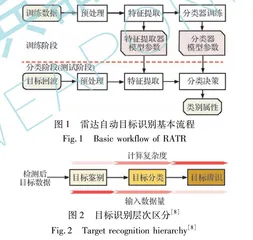
雷达自动目标识别技术(Radar Automatic Target Recog-nition, RATR)是指利用雷达发射电磁波照射目标,对获得的回波进行分析以确定目标的种类、型号属性的技术[5-7]。典型的雷达目标识别方法分为训练阶段和工作阶段,其工作流程如图1所示。训练阶段多在线下完成,主要包括数据获取、预处理、特征提取和分类器训练步骤,其中,特征提取得到特征提取器的模型参数,如在采用特征投影算法时的投影矩阵、在采用深度神经网络时的网络参数等; 分类器训练步骤得到分类器模型参数,如采用支持向量机(Support Vector Machine, SVM)分类器时的边界向量参数等。工作阶段在线上进行,包括数据获取、预处理、特征提取和分类决策步骤,最后输出目标的类别属性。
按照对目标区分的层次不同[5],RATR包括三个层次的含义: 目标鉴别(Target Discrimination)、目标分类(Target Classification)和目标辨识(Target Identification),如图2所示,这三个层次是逐层递进的。目标鉴别即对检测得到的多个目标进行真假目标分辨,如待打击目标(如坦克、雷达车)和干扰(如角反射器)之间的区分,其所需处理的数据量较大,但计算复杂度较低。目标分类即对目标鉴别后得到的感兴趣目标进行类别区分,如雷达车和坦克之间的区分,该阶段所需处理的数据量小于目标鉴别,但是计算复杂度较高。目标辨识是在目标分类的基础上确认同类目标的具体型号,该阶段处理的数据量最少,但由于待区分目标形状接近,故识别模型最为复杂,计算复杂度最高。
RATR技术是导弹智能化、信息化的重要技术支撑手段,可有效提高我方战斗力和战场生存能力、减少作战成本、提高作战效率,因此,对RATR技术的研究具有重要的军事应用价值[9]。
2 弹载雷达地面目标识别面临的问题
精确制导武器的核心部件是导引头,导引头通过感知复杂战场环境,完成对感兴趣目标的探测、识别和跟踪,最终引导导弹实现对目标的精确打击[10]。雷达导引头,特别是毫米波雷达导引头的工作频率高,易在更小的体积和重量下实现更大带宽,获得更高的距离分辨率、速度分辨率和角分辨率,在空地导弹领域取得了广泛应用[4, 11]。随着硬件水平和信号处理能力的不断提升,空地导弹导引头上搭载的雷达传感器经历了从窄带到宽带、从单极化到多极化的发展历程,从而使得雷达能够收集到目标更多的细节信息。与之相对应,学者们研究了基于单极化高分辨距离像(High Resolution Range Profile, HRRP)、单极化合成孔径雷达(Synthetic Aperture Radar, SAR)图像、多极化HRRP等的雷达地面目标识别技术,使得对地面目标的识别能力逐步提升[12]。
相比于反舰和防空等导弹应用,空地导弹雷达导引头面临更加复杂的地面环境,如图3所示,其主要感兴趣目标为装甲车辆、防空单元、运兵车、导弹发射车等。一方面,感兴趣目标可能处于草地、沙漠、丘陵、雪地、公路、农田等不同场景中,如图4所示,这些场景反射特性不同,地杂波统计特性不同,不同的地面背景对目标回波产生不同程度的调制,导致目标回波特性退化甚至发生变化。另一方面,地面场景中可能存在各种干扰,如敌方释放的有意电磁干扰、敌方布置的无源干扰(如角反射器、箔条)、自然干扰(如房屋、高压塔、树木、土丘)等,这些假目标对感兴趣目标的探测形成干扰。因此,雷达地面目标识别需具备对干扰的拒判能力和对感兴趣目标的辨别能力[13]。
在空地导弹雷达制导应用背景下,雷达地面目标识别面临的主要困难来源于以下几个方面:
(1) 感兴趣目标“慢且小”,导致回波信杂噪比低。
不同于海面舰船目标和空中飞机目标,地面车辆目标的雷达散射截面积(Radar Cross Section, RCS)较小,运动速度慢甚至静止,部分目标还配置掩护网,目标的RCS进一步减小,回波幅度相对较小。通常情况下,雷达目标识别训练阶段的数据是在较高的信杂噪比环境下获取的,因此,所用的训练数据质量好,信杂噪比高。然而在实际应用中,导弹由远及近接近目标,带来两个问题: a. 当雷达距离目标较远时,目标回波相对较弱,导致信噪比较低; b. 当雷达距离目标较近时,波束入射余角较大,地面散射系数较大,导致地杂波较强,信杂比较低。信杂噪比较低的测试数据与训练数据失配,如果不对噪声和杂波进行处理,识别准确度将受到极大的影响。因此,低信杂噪比下的目标识别是地面目标识别所面临的问题之一。
(2) 提前可获得的目标信息少,导致小样本识别问题。雷达目标回波可认为是目标上散射点的相干叠加,而目标不同方位的散射特性差异较大,其回波形状随着雷达观测视角的变化而变化,这便是其姿态敏感性。因此,在进行目标识别时,为了得到好的识别效果,训练样本应包含目标全方位的雷达回波,以实现对目标散射特性完备的表征。然而,对于雷达导引头来说,可获得的训练样本有限,原因主要有: a. 目标的非合作性。感兴趣目标多是敌方非合作目标,保密级别较高,我方难以获取感兴趣目标全姿态的回波,而雷达导引头需在有限样本下对感兴趣目标正确分类。b. 战场环境复杂多变。雷达波束照射范围内可能出现的干扰复杂多样,如不同形状的沟坎、房屋,敌方布置的有意干扰等。在线下阶段无法收集干扰的所有姿态回波样本,甚至缺乏很多类型的干扰回波样本,而空地雷达导引头需要在干扰样本有限的情况下对干扰进行正确拒判。有限样本将会导致训练得到的分类器产生过拟合,对测试样本的识别性能差。因此,小样本目标识别是雷达地面目标识别的主要问题之一。
(3) 目标集群化出现的概率高,导致波束内群目标识别问题。
地面感兴趣目标特别是装甲类车辆,通常集群化出现,且相互距离近,如图5所示,集群目标中的若干目标不可避免地同时出现在雷达导引头波束内。当波束内的各个目标径向距离相近甚至相同,其回波会出现部分或完全重合的现象。此时,若将多个目标当成单一目标处理,则由于目标距离像相对于训练模板发生较大变动而错判,从而导致识别的概率严重降低[14-15]。
3 雷达地面目标识别技术研究现状
3.1 噪声/杂波稳健的地面目标识别技术研究现状
3.1.1 噪声稳健的目标识别技术研究现状
由于低信噪比条件下的目标识别问题是地面目标、空中目标和海上目标雷达自动识别的通用问题,针对空中目标和海上目标的噪声稳健的RATR方法同样可应用于地面目标识别中,因此,这里概括低信噪比条件下的RATR方法时不区分应用场景。
目前,学者们对低信噪比环境下的雷达目标识别技术进行了大量研究,主要有三种解决途径: 第一种是提取噪声稳健的特征; 第二种是在识别前进行预处理,去除或减弱噪声分量; 第三种是在测试阶段根据噪声水平自适应更新分类器参数。
(1) 噪声稳健特征
噪声稳健的特征一直是学者们研究的重点内容。双谱特征很早就被证实是一种对噪声稳健的特征。由于加性高斯白噪声双谱为0,故学者们提出很多与双谱有关的特征,如对数双谱[16]、径向积分双谱[17]、轴向积分双谱[18]、圆周积分双谱[19]、按照Fisher准则选定的双谱元素特征[20]等,均对噪声具有稳健性。然而在实际应用中,由于双谱特征计算量大的特点,其应用范围受到限制。
强散射中心幅度较大,同样具有噪声稳健性,且其维度小,在运算量、所需存储空间和识别性能上均有明显的优势。基于此,文献[21]利用矩阵束法提取散射中心,定义了散射中心阶数、相对位置和中心矩三个特征进行识别,并利用外场实测数据验证了该方法的噪声稳健性。文献[22]基于散射中心的稀疏分布特性,利用正交匹配追踪(Orthogonal Matching Pursuit, OMP)算法提取了HRRP主散射中心幅度和位置信息作为特征,并利用Hausdorff距离实现散射中心集间的匹配,实测数据实验表明该算法的噪声稳健性优于对比算法。然而,强散射中心的径向位置属性具有平移敏感性,在进行提取时需进行对齐处理。
深度神经网络能够提取对目标表征能力更强的特征,在近几年里,学者们针对低信噪比下的雷达目标识别问题设计了若干适用的网络模型。文献[23]提出深度u型盲去噪网络(Deep-u-Blind Denoising Network, DUBDNet)。文献[24]提出梯度稳定递归神经网络(Gradient Stabilized Recurrent Neural Network, GS-RNN)。文献[25]基于卷积神经网络(Convolutional Neural Networks, CNN)结构增强训练集、使用残差块并使用降噪自编码增强网络形成神经网络。文献[26]针对全极化HRRP目标识别提出联合卷积长短时记忆网络(Long Short-term Memory Networks, LSTM)和自注意力机制的网络模型,均取得较好的噪声稳健性。在实际应用中,神经网络的训练需要大量的训练样本,否则容易出现过拟合问题,这使得其应用范围受到限制。
另外,文献[27-28]利用小波变换改善了噪声环境下的识别性能。文献[27]利用多贝西小波(Daubechies Wavelet)将原始HRRP分为多个子带信号,然后对每个子带信号建立分类器,最后对多个子带信号的分类器结果进行融合得到目标类别。文献[28]通过实验发现大量的HRRP信号是不具备判别性的,而通过小波去噪预处理能够有效去除非判别信息,从而显著提高分类性能。
在全极化体制下,文献[29]利用时间平均的方式对HRRP序列进行H/α分解,并利用散射熵和极化角特征对目标散射机制进行分类,分析了杂波和噪声对这两个特征的影响以及分类性能。文献[30]针对全极化HRRP目标识别,利用Cameron分解投影方法提取目标在三面角、二面角和1/4波长器件这三个散射基上的投影,然后分别提出特征级融合简化核极限学习机(Reduced Kernel Extreme Learning Machine, RKELM)和决策级融合RKELM进行融合分类,实验表明该方法在不同的训练样本数下均获得较高的噪声稳健性。
(2) 去除噪声分量
利用噪声和目标信号特性的不同将噪声和目标回波进行分离是解决低信噪比情况下目标识别性能差的另一种方法。子空间投影特征利用一定的映射关系,将目标回波或者其特征变换投影到信号子空间和噪声子空间,然后去除噪声子空间而只保留信号子空间达到去除噪声的目的,典型的特征投影方法如主成分分析(Principal Components Analysis, PCA)[31]、线性判别分析(Linear Discriminant Analysis, LDA)[32]、奇异值分解(Singular Value Decomposition, SVD)[33]等,均在低信噪比条件下的雷达目标识别中取得较好的效果。