基于智能体的无人机集群弹性均衡度量与仿真评估方法
作者: 周国强 穆琳 吴家仁 潘翼 海星朔 高济禾
摘要:无人机集群任务执行过程呈现分布式、多阶段、对抗性等特征,因蓄意攻击导致的持续性破坏事件时有发生。为确保任务执行,要求集群中的各飞行编队均具备一定弹性。然而,现有的度量方法难以有效描述长周期任务和持续性破坏特征下无人机集群能力均衡特征,基于此,本文拟给出一种新的度量与仿真评估方法。首先,提出一种面向任务的集群弹性均衡度量方法,通过任务过程描述,给出编队性能与任务需求度量,由此定义集群弹性均衡;然后,以建模框架、破坏行为以及重构行为模型为基础,建立一种基于智能体的无人机集群联合侦察任务模型,并通过仿真对弹性均衡度量进行评估;最后,以无人机集群执行联合侦察任务为例开展案例验证。仿真结果表明,所提出的度量与仿真评估方法可为无人机集群持续破坏下的能力设计提供支撑,保证无人机集群在任务中可靠、稳定运行。
关键词:无人机集群;弹性均衡;智能体;建模;仿真评估
0引言
随着智能化战争环境日趋复杂,无人机(Unmanned Aerial Vehicles, UAV)集群在任务执行过程中可能面临持续外部破坏,包括连续极端恶劣天气或敌方蓄意攻击等[1],将造成无人机集群部分功能失效、通讯中断甚至整机损毁等问题,严重影响整体任务执行。
为反映集群对破坏事件的承受和恢复能力,国内外学者将“弹性”概念应用到无人机集群的研究中。Bai等[2]提出一种基于当前性能与标准性能差异的改进弹性度量,以反映无人机集群适应破坏性事件和恢复其预期性能的能力。Ordoukhanian等[3]基于仿真方法建立动态效用函数,并对无人机集群任务执行期间的性能备选方案进行实时评估,以此建立无人机集群弹性。Feng等[4]针对无人机编队在随机攻击下的快速重构问题,提出一种编队弹性度量与优化方法,并通过仿真实例验证了方法的有效性和快速性。
弹性来源于对系统设计中赋予其内部各要素的冗余能力[5]。因此,相比于抗毁性[6]、鲁棒性[7]、可靠性[8]等指标,弹性可对无人机集群抵御破坏能力进行全面评估[9-10]。然而,面对集群可能遭受的持续性破坏,要求各飞行编队都应具备一定的冗余,也可以说具备一定“弹性”。当前,表征此类特征的相关度量方法研究较少,故本文重点在于提出一种能够反映集群各组成部分剩余能力均衡特征的度量指标。
智能体被定义为能够在某一环境中与其他个体进行互动、协调以实现特定目标的自治软件实体[11]。基于智能体的建模(Agent-Based Modeling, ABM)方法可以在人工环境中对真实场景中的复杂实体关系进行模拟,因其具有典型的协作性、并行性、鲁棒性、易扩展性等特征,已被广泛应用于无人机集群建模。例如,Zou等[12]提出一种基于ABM方法和多目标优化的多无人机冲突解决方法, 使用参数化的几何表示描述了三维空间中无人机碰撞行为。文献[13-14]等利用ABM方法分别对无人机集群的自主任务管理和任务规划进行设计。尽管国内外研究人员通过ABM方法对无人机集群进行了深入分析,但以上方法在实现任务执行、破坏以及重构建模方面还存在一定不足。
本文针对无人机集群遭受破坏后的剩余能力均衡问题,提出一种持续破坏下无人机集群弹性均衡度量与仿真评估方法,为集群持续破坏下的能力设计提供支撑。
1面向任务的集群弹性均衡度量
1.1基本定义
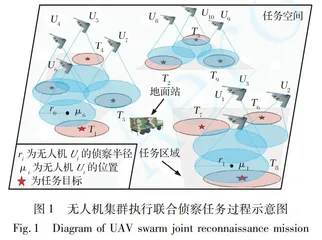
将任务空间Ω∈R3内的无人机集群记为U={U1, U2, …, Un},其中,n为集群规模,n∈N*。对于集群中的每架无人机Ui,i∈{1, 2, …, n},均可通过配备具有识别和测距功能的侦察传感器执行侦察任务[15]。因此,集群可在地面站集中指挥作用下,对部署于地面的多个任务目标进行侦察。将任务目标集合记为T={T1, T2, …, Tm},其中,m为任务目标数量,m∈N*。
航空兵器2022年第29卷第3期
周国强,等:基于智能体的无人机集群弹性均衡度量与仿真评估方法
考虑到不同任务目标的执行需求存在一定差异,且多分散部署于任务空间中。因此,可划分若干任务区域,对其进行分块管理。
定义任务区域集合为Γ={T1, T2, …, Tq}, q∈N*,其中,q≤m为任务区域数量,且有Ti={Tj, j=1, 2, …, m}, i∈{1, 2, …, q}。
为提升任务执行效率,集群中的无人机Agent在任务执行过程中根据不同任务区域集结成k(k∈N*)支飞行编队{F1, F2, …, Fk},满足:i∈{1, 2, …, k}, FiU, Fi≠,即每支飞行编队均由有限数量的无人机Agent组成,并且规定同一无人机不能同时出现在两支不同编队中。
结合上述定义,给出无人机集群执行联合侦察任务过程示意图,如图1所示。
1.2编队性能与任务需求
对于U中任意一架无人机Ui,若以地面为水平参考平面,其在任务空间中的位置坐标用μi(xi, yi, hi)表示。此外,用EUi表示Ui的侦察效率,其含义是无人机Ui的单位任务执行量,即执行一次任务能够完成的工作量。对此,本文通过引入侦察半径(自身属性)对EUi进行量化计算:记无人机Ui的侦察半径为ri,则Ui的侦察效率可等效为一个以μi为圆心、ri为半径的圆形,并通过圆形面积公式计算得到。
考虑任务载荷的计算资源、存储容量限制,每架无人机可执行的任务数量有限。因此,可通过任务资源存量Resi表征Ui的最大执行任务次数。基于此,可得到Ui的侦察能力CUi:
CUi=EUi·Resi(1)
对于集群中任意编队Fj,假设其内部包含的无人机数量为f,其联合侦察能力CFj为
CFj=ζ·∑fi=1CUi(2)
式中:ζ为损耗因子,ζ∈(0, 1]。
对于T中任意一个任务目标Tj,其位置坐标均固定,可将其记为τj(xj, yj, 0)。此外,每个任务目标都有确定的任务需求,即无人机执行该任务需要完成的任务工作量,记为Wj。类似地,可将其等效为一个以τj为中心的圆形,圆形面积值即为该任务目标的工作量。对于任意任务区域Ti,其任务工作总量Wisum为
Wisum=∑mj=1Wj(3)
式中:m为任务区域中的任务目标总数。
1.3弹性均衡度量
在任务执行过程中,集群内各编队能力以及各区域任务需求均存在一定差异,为了确保集群能够应对持续性破坏,应充分考虑其分布式特征,避免因某一编队承担过多任务或遭受多次攻击导致编队剩余能力不足的情况,从而降低集群整体任务执行效率。因此,要求集群中各无人机编队均具备一定“弹性”,即适应并从破坏中恢复的能力。对此,本文提出一种新的度量——弹性均衡(Resilience Balance, RB),并以此表征无人机集群在分布式任务执行过程中的均衡特性。
首先,计算无人机编队的剩余能力Cj。对于由f架无人机组成的编队Fj, 其剩余能力计算公式为
Cj=CFj-Wisum(4)
随后,假设集群中编队数量为k,由此,可基于编队j的剩余能力Cj计算无人机集群弹性均衡Rb:
Rb=∑kj=1(Cj-C)2k(5)
式中:C为各飞行编队剩余能力的平均值。
2基于多智能体的无人机集群联合侦察任务模型
2.1建模框架
ABM方法将无人机集群中的个体视为有决策与行为能力的Agent,通过对其属性、行为以及交互规则描述,构建自底向上的集群行为[16-17]。
本文设计一种基于多智能体的建模框架,模型中各异质要素及运行过程被抽象为建模、任务、装备、环境、算法与评价等6类Agent,通过各类Agent的运行和交互描述各要素的时空动态行为。其中,建模类Agent通过顶层设计,对模型整体行为机制进行构建;任务、装备类Agent是模型的主体部分,是对包含任务目标以及无人机、地面站和通讯的抽象;环境类Agent对应外部环境条件及变化,一般为破坏输入;算法类Agent则可根据环境变化,通过设计不同规则实现重构;评估类Agent则主要结合模型输出对不同指标进行评估。
基于多智能体的建模框架如图2所示。
2.2破坏行为建模方法
针对破坏行为,本文主要考虑因蓄意攻击导致的无人机整机损毁,并建立一种包含全局仿真时钟和整机故障时钟的双时钟设置机制,如图3所示。其中,全局仿真时钟以仿真模型运行为基础,随仿真推进记录集群任务
执行实际时间;整机故障时钟以集群中各无人机实际状态为基础,通过时钟跃迁清除方式模拟无人机由“可用状态”(正常)到“不可用状态”(损毁)的变化过程。
在全局仿真时钟内,将仿真开始时刻记为t0,结束时刻记为tE,由此可得到第k次仿真的总时长为
ΔTk=tE-t0(6)
在整机故障时钟内,设集群V中任意一架无人机vi的时钟存量为Si;当vi状态为可用(正常)时,Si=1,当vi状态为不可用(损毁)时,Si=0。由此可知,设仿真开始时刻集群中各无人机均正常,即Si=1, i=1, 2, …, n, 当蓄意攻击发生在tA时刻并导致无人机vj损毁时,故障时钟直接跃迁至0,即