作战飞机突防航迹规划方法研究综述
作者: 张哲 沈堤 唐鑫磊 余付平 张仁猛
摘 要:随着雷达和地空武器系统性能不断提升,多层次防空体系的逐步建立使突防面临的态势更加严峻;同时,无人作战飞机在战场上的优势日益凸显,作战飞机突防也呈现新的发展趋势。突防航迹规划作为突防任务规划的重要组成部分之一,具有重要研究意义。本文首先对突防航迹规划主要内容进行概述,然后针对前人在规划空间、代价函数、航迹优化和规划算法等方面所做工作进行分析和总结,最后得出当前突防航迹规划研究面临的新挑战和未来研究方向。
关键词:有人作战飞机;无人作战飞机;突防;航迹规划;优化算法
中图分类号:TJ760;V271.4
文献标识码:A
文章编号:1673-5048(2022)04-0011-09
DOI:10.12132/ISSN.1673-5048.2021.0264
0 引 言
作战飞机在执行打击敌纵深重要目标任务时,通常需要突破由预警探测雷达、地空导弹武器系统和高射炮等力量构成的多层防御体系。随着预警雷达和地面防空武器技战术水平的不断提升,作战飞机在执行突防任务时将面临极大的风险挑战。作为能有效提高突防成功率的措施之一,突防航迹规划的好与坏极大影响着突防的成功与否。然而,多层次防御体系中威胁数目多、成员间存在科学的配置关系且有动态的防御部署,使得突防航迹在规划过程中面临着准确模型建立难、求解速度要求高的现实问题。
现有的突防航迹规划相关综述类文献中,韩志刚和叶文等[1-2]都对低空突防航迹规划方法进行了综述,对常用航迹规划算法进行了介绍,并指出多种算法结合使用将是后期的发展方向。但存在以下不足:一是未对突防航迹在预先和实时规划上的不同特点和目标要求进行区分;二是只将突防航迹规划算法作为综述重点,忽略了规划模型的重要作用;三是仅对常用算法的原理及应用进行介绍,未进行横向和纵向比较,即不同算法间比较和相同算法的不同改进型间比较。
鉴于此,本文综合考虑规划模型和规划算法对最优突防航迹生成的影响,通过分析对比前人在规划模型和优化算法方面所做的工作,对当前有人和无人作战飞机突防航迹规划方法进行综述;同时,总结存在的不足并对未来发展趋势与研究方向进行展望。
1 作战飞机突防航迹规划概述
作战飞机突防航迹规划是指根据作战飞机突防任务要求,依据规划的基本原则和流程,在突防起始点到终止点间规划出能有效规避威胁源并满足飞机性能要求的最优或可行航迹。
1.1 作战飞机突防航迹规划基本原则
作战飞机突防航迹规划的基本原则主要是依据突防任务性质制订的。突防是指作战飞机抵近和突击敌方预定目标时穿越或突破其防空体系的作战活动。因此,突防航迹规划活动通常围绕作战飞机的突防成功率展开,其基本原则可分为以下几点:
(1)隐蔽性原则。为最大限度降低作战飞机被敌方雷达发现的概率,在航迹规划的过程中需要考虑其隐蔽飞行的要求,即在雷达探测的低空盲区或者地面障碍物遮蔽下的盲区内飞行,以隐蔽接敌的方式来缩短其响应和处置时间。
(2)安全性原则。作战飞机所处的突防环境复杂,对情报信息的掌握和飞行操作人员的技术水平都有很高的要求。因此,其任务难度大、危险系数高,在突防航迹规划过程中需充分考虑雷达、地面火力威胁的规避和地物避撞,确保作战飞机安全抵达目标空域。
(3)高效性原则。突防任务对于作战飞机在威胁区域的飞行时间要求较高,规划的航迹应当尽可能短,以确保作战飞机能用最少的飞行时间穿越威胁区域。
1.2 作战飞机突防航迹规划的分类
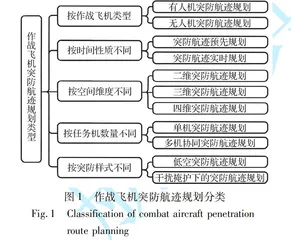
围绕作战飞机突防航迹规划的主要内容和基本流程,国内外专家学者开展了大量的理论方法研究,通过文献整理和分析得出,现有研究成果的创新在各个方面都有涉及。因此,其类别因研究切入点不同可以有不同的分类方式。常见的分类方式如图1所示。
1.3 作战飞机突防航迹规划内容及流程
作战飞机突防航迹规划的主要目标是通过适当方法规划出满足任务、环境约束条件和飞机性能指标的飞行航迹。围绕这一目标开展的主要工作有航迹规划的空间建模、约束条件分析、航迹代价评估与优化建模和航迹规划算法选取。
(1)航迹规划空间建模。包括地形空间建模和威胁空间建模两个方面:地形空间建模又包括了地理信息的获取与处理;威胁空间建模主要涉及预警雷达探测、地面防空武器威胁等的建模。
(2)航迹规划约束条件分析。作战飞机突防过程中的约束条件主要分为自身物理约束、作战环境约束和作战任务约束三个方面:自身物理约束主要指由于飞机性能指标的影响,在航程、航速、飞行高度、爬升/下降角和转弯角等都存在最大/最小值;作战环境约束是指地形、气象等环境因素对飞行安全产生的限制;作战任务约束是指根据任务需要所明确的飞行要求。
(3)航迹代价评估与优化建模。航迹代价评估是指通过选择重要的变量作为航迹代价指标,结合权重分配建立代价函数,以此作为评价航迹优劣的标准,常用的航迹代价指标有航程、飞行高度、与敌方雷达距离以及时间和空间协同代价等。航迹优化是指考虑各类影响因素,对生成的航迹进行平滑处理或者航迹点调整优化。
(4)航迹规划算法选取。航迹规划算法是航迹规划问题求解的核心。选取合适的算法并结合具体模型特点对算法进行改进,结合代价函数规划出满足约束条件和威胁规避要求的可行或者最优航迹。常用规划算法可分为传统算法和智能优化算法两大类。
突防航迹规划的方法复杂多样,但是主要内容和规划流程相对较为固定,其流程描述如图2所示。
2 突防航迹规划空间建模方法
作战飞机突防航迹规划空间建模包括地形空间建模和威胁空间建模两部分:地形空间建模是指通过对突防区域地理信息的获取和数据处理,将其转化为突防飞行底图的过程;威胁空间建模是指对敌方雷达、地空导弹和高射炮等火力威胁范围进行建模的过程。
2.1 地形空间建模
地理信息获取和处理是突防航迹规划的基础和首先要解决的问题。地理信息处理的好坏直接影响到搭建的规划环境是否与实际飞行环境吻合一致,如果相差较大则航迹将不可飞,易造成飞行安全问题或暴露于敌雷达探测范围内。地形空间的建模通常以数字高程(DEM)数据为基础,数字高程数据是一组用有序数值阵列描述地球表面高程或海拔高程信息及其空间分布的数据集,是一种离散的表示方式。
2.1.1 基于数据插值的地形空间建模
地形的数字高程数据在生成过程中仅采集网格点上的高程信息,网格内的高程数据无法体现,因此,在使用时可能与实际存在较大偏差。为得到部分不在网格点上的特殊位置高程信息,需要通过数据插值的方式对地形空间进行处理。常见的插值方法有双线性插值、双立方Hermite插值和二维三次卷积插值等[3]。樊旭东等[4]通过二维三次卷积插值法对数字高程地图进行了处理。
2.1.2 基于平滑处理的地形空间建模
考虑到作战飞机的机动性能和飞行安全,尤其是在低空突防时地形起伏较大的情况下,很难在满足飞行姿态调整次数少的同时实现完全的地形跟随飞行。因此,需要在地形空间建模时对实际地形进行平滑处理。
白晓利等[5]将垂直方向上的离地间隙作为指标对地形进行平滑处理,方法较为简单且便于工程化实现。彭建亮等[6]基于无人机在最大爬升/下降角和法向过载方面的机动性能要求,以坡度和曲率两个指标对地形进行平滑处理,生成可飞的平滑曲面。张志伟等[7]将地形通过升限处理、洼地填平和禁区剔除的方式生成平滑的安全曲面。刘希等[8]对多无人机低空突防问题进行研究时在可飞曲面生成中提供了高度分配方案。翁兴伟等[9]针对使用平滑算法对地形高程预处理时出现的点位拉高而不收敛情况,将最大过载、爬升角和速度约束作为地形平滑的指标,设计多步判断逻辑防止相互拔高和削平,达到更好的平滑效果。
地形空间的平滑处理不仅要满足作战飞机性能的需要,还需抬高安全飞行曲面,为突防飞行预留合适的安全裕度,在此基础上开展突防航迹规划。
2.1.3 基于灰度图像转化的地形空间建模
基于灰度图像转化的地形空间建模是在地形高程数据的栅格式数字地图的基础上,将其转化为灰度值范围在0~1之间的灰度图像的过程。
穆中林等[10]通过将地形数字高程转化为灰度值建立灰度图像并叠加威胁区等效威胁,形成供规划使用的灰度图像。在规划过程中基于分水岭分割方法,引入控制标记符对灰度图像进行分割形成无向网络图。Jaishankar等[11]提出一种图像处理中的距离变换方法,该方法将三维环境用灰度图像的方式进行表示,并以此作为航迹规划的底图。其用类似于地理信息系统的技术以地理位置分层数据的形式对三维环境进行建模,将空间多准则决策分析技术与距离变换技术相结合,生成最优的突防航迹。
这种地形空间建模方法主要借助高程数据的简单处理和转化来实现,对于复杂规划问题的求解影响较小,实际应用较少。
2.2 威胁空间建模
威胁空间建模主要解决如何对威胁信息进行准确处理和量化的问题。建立合理的威胁空间模型,才能清楚地区分可飞区域和不可飞区域,判断敌雷达探测和火力打击范围,对提高作战飞机突防成功率具有重要意义,对突防航迹规划的速度也将产生直接的影响。
2.2.1 基于通视性分析的威胁空间建模
雷达探测和低空火力因受到地形和地球曲率的影响而产生作用盲区,因此,为取得更好的突防航迹规划效果,需要通过通视性分析来建立更为真实的威胁空间。通视性分析主要依赖地形高程数据,结合雷达和地面防空武器性能指标,对敌方地面实际威胁范围进行建模。
郝震等[12]考虑现实环境下地形对雷达探测产生遮蔽的情况,采用地形可视性算法对雷达真实探测范围进行计算,该方法考虑了雷达的真实探测范围,使条件假设更符合实际。唐隆等[13]对低空突防过程中出现雷达探测威胁不可规避的情况,对雷达进行通视性分析并建立其探测模型。汪先超等[14]通过对预警机雷达在地物杂波背景下的目标探测体制进行分析,得出其所用的PD体制雷达存在多普勒盲区,在对多普勒盲区形成机理进行分析的基础上,对预警机的空中探测威胁进行建模。胡艺铭等[15]在考虑地形遮蔽的条件下,用混合采样的方法生成雷达三维探测范围并进行修正。潘明等[16]将作战区域以正六边形做剖分,基于多雷达探测概率融合和地形遮蔽对威胁空间进行建模。
2.2.2 基于等效模型的威胁空间建模
由于威胁空间较为复杂多样,使得在威胁空间建模的过程中很难进行精确描述,因此,通常将其等效为规则的半球体和圆柱体等几何体进行研究,有时也将其等效为地形,并将其进行叠加。
胡志忠等[17]将威胁源的最大作用范围形成的曲面包络等效为地形,并用击落概率数值作为系数进行修正。马云红等[18]通过对地形栅格高程数据进行图形化处理来缩小搜索空间,将威胁在地形图上进行叠加来构成威胁场,将其转化成有向图来克服算法在求解时产生的维数爆炸问题。夏丛亮等[19]对直升机低空突防航迹规划问题进行研究,将威胁区域等效为地形,用具有一定半径的圆柱体进行表示。熊自明等[20]将地面火力和干扰威胁等效为近似山峰的地形威胁处理。