面向高机动目标拦截任务的空空导弹制导方法综述
作者: 纪毅 王伟 张宏岩 范军芳 豆登辉 裴培
摘 要:当下高速飞行武器技术的飞速发展为防空反导任务带来严峻挑战,亦对应用于空空导弹的目标轨迹预测技术与空空导弹制导技术提出全新要求。在此背景下,本文提出空空导弹目标预测与制导任务的新需求,以两种典型空空导弹为例介绍第四代空空导弹的特性,阐述了空空导弹制导系统工作方式,详细综述了高速目标轨迹预测方法、制导算法以及制导控制一体化方法的研究现状,并对比分析了各方法的优势与缺陷。最后,对仍需进一步研究的问题进行展望。
关键词:导航、制导与控制;空空导弹;高机动目标;目标轨迹预测;制导算法;制导控制一体化
中图分类号:TJ765.3;V249
文献标识码:A
文章编号:1673-5048(2022)06-0015-11
DOI:10.12132/ISSN.1673-5048.2022.0119
0 引 言
空空导弹指由战斗机、无人机等空基平台发射的攻击飞机、战略战术导弹、低轨卫星或临近空间飞行器的弹药武器系统,是拦截敌对目标、完成防空反导任务、保障空天安全的难以替代的有力武器。与地基、海基导弹以及机载定向能武器相比,空空导弹具有以下优势:飞行速度更快,机动性更强,发射平台兼容性强;系统部署区域广泛,作战方式灵活;作战高度更高,效率更高;目标匹配性高[1-2]。
当今世界正经历“百年未有之大变局”,给国土安全带来全新挑战。随着世界新军事革命的深入发展,以美国为首的西方军事强国在第五代战斗机、巡飞弹、弹道导弹等一系列高速飞行武器领域取得重大突破[3-4]。针对大气层内高速飞行目标的防空反导任务,正成为国防事业不可或缺的一环。随着高速飞行武器技术不断发展,防空反导任务对具有精确制导能力的空空导弹的需求越来越迫切,主要体现在:(1)高速飞行目标飞行包络更广,飞行轨迹复杂,飞行状态多变,难以实时预测,传统飞行模式难以满足目标动态追踪的需求;(2)高速飞行目标复杂的运动状态使末制导段弹目视线角呈不确定性时变状态,对空空导弹鲁棒性与抗扰性提出要求;(3)高速飞行目标过载呈现高频大幅震荡状态,为实现精准拦截,空空导弹的控制系统与执行机构需快速精确地提供对应的过载。为此,亟需研发能实现对目标轨迹的准确预测与精确拦截的制导技术,以综合提高空空导弹的制导性能,完成针对高机动目标的精确制导任务,满足复杂战场环境下的精确防御需求。
提前预判高速飞行目标的攻击意图,据此预测其运动轨迹,可为空空导弹的战术决策提供依据,有利于提升其拦截成功率。海湾战争中,面对伊拉克军队“飞毛腿”导弹的攻击,美军总是要发射数倍数量的“爱国者”导弹进行拦截,但拦截成功率仅为40%[5]。其原因一定程度上在于对对方高速飞行器攻击意图和运动轨迹的判断不明,而不得不在其飞行轨迹各区域中分别进行拦截。相比于30年前的“飞毛腿”导弹,未来战争中高速飞行目标将拥有更大的可用过载和更强的离轴运动等性能,轨迹灵活性将有明显提升。为提高作战效费比,挖掘空空导弹的潜能,优化战术决策,提高拦截效果,有必要研究高速飞行目标的轨迹预测技术[6-8]。
高速飞行目标瞬时过载巨大,运动状态变化剧烈且具有强非线性与强不确定性, 弹目视线角速率具有高频
大幅震荡特征,且随着弹目距离的接近而愈发增强,在空空导弹的末制导段逃逸能力极强[9]。传统制导弹药采用的比例导引类制导律推导自线性制导动力学模型,难以跟踪高机动非线性目标,且末端过载过大的现象时有发生,严重限制了末制导效果[10]。此外,考虑高速飞行器运动状态时变以及末制导段弹目距离较近等因素,诸如数学模型不确定性、气动参数漂移、目标运动估测误差等微小扰动亦会对弹目视线角速率的获取产生较大影响。因此,有必要研究具有抗干扰自主追踪能力、可根据高速飞行器的运动状态实时计算对应的制导指令的高精度强鲁棒末制导技术。
对隐形目标的突发性打击任务要求空空导弹具有对制导指令快速高效的响应能力。经典双回路制导控制结构忽略了制导与控制回路间的兼容性,基于频谱分离原则分别设计制导与控制系统。然而在末制导段,较小的弹目相对距离导致空空导弹制导回路的带宽逐渐增大,制导系统与控制系统之间的关系难以协调,进而导致其过载指令得不到快速高效的执行,严重限制了空空导弹的制导指令响应与过载能力[11]。为消除经典双回路制导控制系统中制导回路与控制回路间的不兼容性,有必要开展制导控制一体化系统与算法的相关研究。
综上所述,正是在针对高速飞行器的迫切拦截需求与空空导弹实际工程背景的牵引下,面向日趋复杂的战场环境,本文对高速飞行目标意图识别与轨迹预测问题、末制导段空空导弹目标逃逸与扰动抑制问题、临近目标时制导指令快速高效响应问题进行深度调研,并对上述问题的现有解法进行综述,对需要进一步研究的问题进行展望。
1 典型先进空空导弹简介
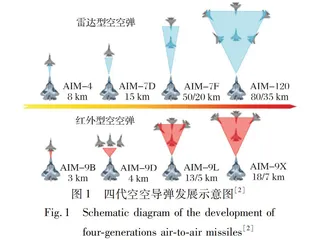
空空导弹是从空中发射、攻击空中目标的导弹[1]。从20世纪40年代问世以来,已历经四代重大革新,逐渐成为空战的主要武器。在近80年的发展历程中,空空导弹逐步实现“质量轻型化、外形细长化、射程远程化、轨迹灵活化”,由第一代、第二代的“追尾式”攻击方式过渡至第三代、第四代的“全向式”攻击方式,其发展历程如图1所示[2]。
根据制导体制差异,空空导弹可分为红外制导型空空导弹和雷达制导型空空导弹两大类。其中,红外制导型空空导弹具有体积小、重量轻、成本低、使用方便、维护便捷、不依赖于机载雷达数据链系统配合、适用于小型廉价战斗机装配等优势[1]。但受其制导体制限制,红外型空空导弹仅适用于射程小于20 km的近程拦截任务。雷达制导型空空导弹虽不具备上述优势,但其射程通常可达35~80 km,部分雷达制导型空空导弹射程可达160 km,有利于战斗机战场生存和执行中远程拦截任务,具有十分重要的作用。
“响尾蛇”AIM-9X近战空空导弹是第四代红外制导型空空导弹的典型代表,是“响尾蛇”导弹家族中最新改进型,其结构如图2所示。不同于“响尾蛇”空空导弹家族中其他任何型号弹药,AIM-9X导弹弹身细长,只有四个前置固定翼与四个很小的矩形尾翼。此外,取消了陀螺舵的设计,使用专用的姿态控制系统来确保弹体在飞行过程中不会发生自旋。该导弹具有大离轴角拦截与发射能力,可以在±90°视场范围内寻找目标, 在严重杂波和红外干扰环境下仍可实现精准打击。
在制导系统方面,AIM-9X导弹采用先进的红外自寻的制导系统,导引头采用图像增强红外焦平面阵。不同于普通红外制导导弹,AIM-9X导弹的数字化制导系统可以选择攻击目标的薄弱部分,而非直奔目标发热量最大的发动机尾喷口。通过与最新型联合头盔瞄准系统(JHMCS)交联并配备新型三维喷气矢量系统,AIM-9X导弹具备比配备传统制导系统的导弹优异得多的转向能力。利用头盔瞄准具,飞行员只要注视着敌机就可以使该导弹飞向目标。
在控制系统与执行机构方面,AIM-9X 导弹采用了先进的自动驾驶仪系统,具有很强的机动控制能力;采用矢量控制系统,通过改变发动机尾燃气舵喷口喷气方向来控制导弹的飞行方向,从而让导弹有了更加敏捷的飞行能力;采用了尾部控制翼设计,缩小了弹翼面积,以适应F-22“猛禽”战斗机的弹舱容积限制。
“AMRAAM”AIM-120D中程空空导弹是第四代雷达制导型空空导弹的典型代表,其结构如图3所示,是美军产品改进计划(P3I)的第四代产品。其改进主要包括采用GPS辅助惯导与双向数据链,增大离轴发射角,改进制导软件以改善运动学性能,扩大了不可逃逸区,将射程提高50%,提高了电子扰抗能力,进一步提高导弹的精度、射程、杀伤力和生存能力。
AIM-120D导弹的一大特色是采用了空空导弹中罕见的基于卫星-惯性组合导航系统的弹道中段补偿方法。该方法可减少惯导系统的误差,提高路径规划效率,进而节约能量,在无需对发动机进行改进设计的条件下提高射程,使其达到160 km。同时,该方法可降低导弹的对准误差,提高导弹的制导精度。
AIM-120D导弹的另一大特色是采用了双向数据链路通讯系统。弹体前部装有共形天线,支持导弹与母机间双向通信功能。这使得导弹可以成为空中打击网络的一个节点,既可以补充预警飞机和战斗机雷达的探测范围,又可以作为空中作战网络体系的一个传感器,实现武器、火控、指挥、探测、决策之间的无间隔交连。双向数据链路通讯还可以使导弹被载机发射后,由另一架战斗机控制其飞行状态,此时,载机可以立即脱离,进入下一个作战空域。
2 典型空空导弹制导方式与关键问题
空空导弹制导过程主要包括战术决策段、初始段、中制导段、中末制导交接段、末制导段、目标交会段。其中,中制导段和末制导段的效能直接决定空空导弹能否精准命中目标。中制导的作用是控制弹体平稳飞行至导引头的探测范围内(通常不大于25 km),末制导的作用是将弹体精准导引至目标,以实现精确拦截。
制导控制系统是空空导弹实现精确拦截的核心,通常由目标运动探测器(Seeker)、中央处理器(Center Processing Unit,CPU)、自动驾驶仪(Autopilot)和执行机构(Actuator)组成(也有资料将执行机构视为自动驾驶仪的组成部分[12] )。各组部件简介如表1所示。
此外,部分空空导弹(如AIM-120D)存在GPS/INS辅助制导系统。该系统虽不可独立作用于制导指令生成,仍需依赖雷达或红外探测系统,但可实时生成导弹位置信息,提供参考弹道,有利于空空导弹中制导飞行增稳增程。
空空导弹制导控制系统的工作流程如图4所示。首先,目标运动探测模块工作,探测高速飞行目标的位置、速度等信息。对于超视距攻击的雷达型空空导弹,该过程通常发生在导弹点火前,即机载雷达需提前锁定目标位置,并将该信息装订至火控系统。对于红外型空空导弹,通常由飞行员瞄准目标之后,目标位置信息被发送给弹载计算机,由中央处理器实时解算弹目相对位置信息(该信息通常为弹目视线角速率),并将其作为制导律的输入量,以生成需用过载。该过载指令被输送至自动驾驶仪,解算出执行机构指令,控制执行机构工作,进而改变弹体动力学,实现精准拦截。
空空导弹的制导流程如图5所示。在空空导弹实际应用中,下述制导控制问题时常出现,严重影响其拦截效果:
(1) 高速飞行目标意图识别与轨迹预测问题。高速目标飞行轨迹难以预测,导致空空导弹的制导策略难以确定。该问题常发生于战术决策段与中制导段,可通过设计基于贝叶斯推断(Bayesian Inference)[13-16]的轨迹预测方法解决。
(2) 末制导段高速目标逃逸与扰动抑制问题。随着末制导段弹目相对距离的接近,高速飞行目标自身逃逸能力和扰动对弹目视线角速率的影响被放大,导致制导失准。该问题常发生于末制导段,可通过设计非线性强鲁棒制导律[17-18]解决。
(3) 临近目标时制导指令快速高效响应问题。空空导弹制导系统与控制系统之间存在时间滞后问题,制导指令难以快速高效执行,导致制导精度降低。该问题常发生于空空导弹临近目标时,可通过设计制导控制一体化系统及算法[19-20]解决。
综上所述,为实现空空导弹对高速飞行目标的精准拦截,需解决高速飞行目标意图识别与轨迹预测问题、末制导段高速目标逃逸与扰动抑制问题、临近目标时制导指令快速高效响应问题。下面就这些问题的国内外研究现状进行分析。
3 目标轨迹预测方法研究现状
高速飞行目标轨迹预测是防空反导领域的重大课题之一,其准确程度直接决定了空空导弹的命中效果,进而影响了我方拦截策略。对我方指战员而言,对方高速飞行器属非合作目标,其运动学与动力学信息无法直接获取,需根据其先验飞行轨迹推测其航向、速度和气动参数等信息。邵雷等[21]将目标的轨迹预测方法分为三类,即基于目标运动机理信息的轨迹预测方法、基于统计学原理的轨迹预测方法、基于目标机动意图的轨迹预测方法。表2对比了上述三种方法的优势与缺陷。