肌肉组织驱动的两足机器人
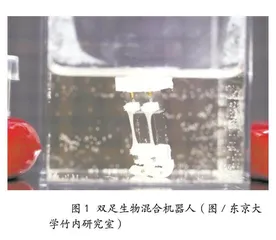
日本研究人员将肌肉组织和人造材料结合,制造出一款双足生物混合机器人。该机器人有一个泡沫浮标顶部和加重的腿,能帮助它在水中直立,骨架主要由可弯曲以适应肌肉运动的硅橡胶制成。研究人员将培养的骨骼肌组织条连接到硅橡胶和该机器人的两条腿上,通过每5秒腿之间交替进行电刺激其肌肉组织,使生物混合机器人以5.4毫米/分钟的速度完成了行走。以机器人左腿为锚点,每隔5秒反复敲击一次右腿,其在62秒内完成了90°左转。
上一篇:
智能角膜重建“原生感觉”
下一篇:
吃塑料吐“蜘蛛丝”的改造细菌