基于 YOLOv8的电动车头盔佩戴检测方法
作者: 申静 曾晴 曾小舟
摘要:在城市交通中,时常出现由于电动车骑行者未佩戴头盔引发的安全事故。佩戴头盔可以有效地避免或降低安全事故带来的损害。为了解决这一问题,提出了一种基于YOLOv8的电动车头盔佩戴检测方法。首先采集数据并对数据集进行手工标注,然后将标注好的数据集分别通过YOLOv8模型的4种模型进行训练,即YOLOv8n、YOLOv8s、YOLOv8m和YOLOv8l模型,从而得到最适合检测电动车头盔佩戴的模型。实验结果表明,相较于其他三种模型,YOLOv8m模型更适用于电动车头盔佩戴检测。
关键词:YOLOv8;YOLOv8m模型;城市交通;目标检测;电动车头盔佩戴检测
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2024)23-0014-03
开放科学(资源服务)标识码(OSID)
0 引言
随着经济社会的快速发展,机动车的保有量急剧增加,城市交通拥堵现象越发严重。电动自行车以其轻便、速度快、节能等优点成为人们短距离出行的主要方式[1]。据工业和信息化部消息,我国的电动自行车社会保有量已达3.5亿辆[2]。与此同时,由电动车违规骑行引起的交通事故也在增加,其中电动车骑行者不佩戴头盔的现象尤为突出。据统计,电动车驾驶者死亡事故中约有80%为脑颅损伤致死,而死亡者大多数并未佩戴头盔。若电动车骑行人员正确佩戴头盔,能够将由此造成的交通事故死亡风险降低60%~70%,这对保护电动车骑行者的生命安全有着至关重要的作用。
随着2020年4月“一盔一带”安全守护行动在全国各地的开展,已经有许多国内学者对电动车头盔佩戴检测展开了研究[3]。电动车头盔佩戴检测属于目标检测中的一种。目标检测算法主要分为传统目标检测算法和基于深度学习的目标检测算法。当下应用较为广泛的是基于深度学习的目标检测算法,其分为One-Stage算法和Two-Stage算法。One-Stage算法(如YOLO[4]、SSD[5]) 有着更快的检测速度,而Two-Stage算法(如Fast R-CNN[6]) 则有着更高的检测精度。由于目前的电动车头盔佩戴检测对实时性有着较高的要求,因此较多学者选择了检测速度较快的YOLO算法,并在原模型基础上提出了各自的改进算法,提高了检测效率。例如,吴冬梅等提出了基于改进YOLOv4算法的电动车驾驶人员头盔佩戴检测方法,将数据集利用K-means算法进行聚类,在CSPDarknet53主干特征提取网络的输出层增加卷积层,并在PANet网络部分增加SPP空间池化金字塔,以增加感受野,从而提高对电动车驾驶员是否佩戴头盔的检测能力[7];王艳鹏等利用数据增强方法扩充数据集,再将主干网络CSPDarknet中普通卷积改为深度可分离卷积,然后运用K-means++聚类算法对网络anchors进行重新设置,最终改进后的YOLOv4网络的平均精度均值(mAP) 提高了2.75%[8];朱硕等利用改进的YOLOv5神经网络进行训练,获得最优权重参数,使得改进后的YOLOv5算法对于头盔的检测精度达到98%,比原始神经网络的识别准确度提高了1%~2%[9];朱周华等引入卷积块注意力模块和协调注意力模块,采用改进的非极大值抑制(NMS) ,增加多尺度特征融合检测,并结合密集连接网络改善特征提取效果,建立了基于改进YOLOv5s的电动车驾驶人头盔检测系统[10]。
1 YOLOv8 算法
YOLOv8是Ultralytics公司在2023年1月10日开源的YOLO系列的新算法,目前支持图像分类、物体检测和实例分割任务,并基于缩放系数提供了五种尺度算法以满足不同场景需求。YOLOv8系列包含5个模型,从小到大分别是YOLOv8n、YOLOv8s、YOLOv8m、YOLOv8l和YOLOv8x。其中,YOLOv8 Nano(YOLOv8n) 是最小且速度最快的模型,而YOLOv8 Extra Large(YOLOv8x) 则是最准确但速度较慢的模型。
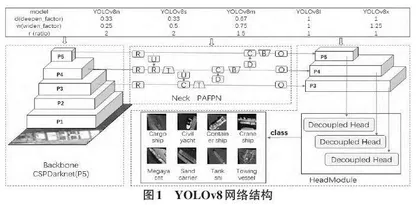
YOLOv8由于采用了新的骨干网络、检测头和损失函数,并且可以在包括CPU和GPU的多种硬件平台上运行。因此,相比其他版本,YOLOv8在速度、准确度、硬件支持等方面都得到了提高。这些优势使其成为了目前目标检测、图像分割等任务中最流行、最成功的模型算法之一。YOLOv8网络结构主要包括Backbone骨干网络、Neck颈部结构和Head头部结构三部分,如图1所示[11]。
1) Backbone:骨干网络实现特征提取。该部分将YOLOv5的C3模块替换为梯度流更丰富的C2f模块,并对不同尺度模型调整了不同的通道数。与YOLOv5的C3模块相比,C2f模块具有更少的参数量和更优秀的特征提取能力。
2) Neck:颈部结构实现特征融合。该部分通过多尺度特征融合,将来自Backbone骨干网络的不同阶段的特征图进行融合,以增强特征表示能力。YOLOv8的Neck部分包括一个SPPF模块、一个PAA模块和两个PAN模块。
3) Head:头部结构实现检测信息输出。该部分负责最终的目标检测和分类任务。使用的是当前主流的解耦头结构,将检测头和分类头进行分离,并将Anchor-Based换成了Anchor-Free检测头。Anchor-Free检测头生成目标检测结果,而分类头则采用全局平均池化来对每个特征图进行分类。
2 实验与结果分析
2.1 实验平台
为验证本文方法的有效性,本文搭建了相关实验平台,使用Win10专业版作为操作系统,PyTorch作为深度学习框架对模型进行训练和测试,具体实验环境配置如表1所示。
2.2 数据集收集
本文采用百度飞桨公开数据、网络爬取数据和实地拍摄数据三种方式相结合制作了数据集。手工去掉不合格的图像,比如自行车骑行、摩托车骑行等干扰图像。最后得到的电动车骑行图像共868张,包括电动车佩戴头盔图像(556张)和电动车未佩戴头盔图像(312张),如图2所示。
2.3 数据标注
使用Labelmg软件对数据进行标注。标注的数据分为2个类别,佩戴头盔标为WithHelmet类,未佩戴头盔标为WithoutHelmet类。标注完毕后,该软件会自动生成XML文件,便于训练使用。
2.4 评价指标
本文通过精确率P(Precision) 、召回率R(Recall) 、平均精度均值mAP(mean Average Precision) 来衡量YOLOv8模型对电动车头盔佩戴情况的检测效果。平均精度均值mAP是通过将检测电动车头盔佩戴的AP求平均值而得到。其中AP(Average Precision) 是对PR曲线求积分,即以精确率P和召回率R所围成的曲线的面积值。精确率P指分类器判定是正类并且是真正类的部分占所有分类器判定是正类的比例。召回率R指是正类并且确实是正类的部分占所有确实是正类的比例。平均精度均值mAP能够反映电动车头盔的平均检测水平,mAP值越大,检测效果越好。
2.5 实验结果分析
实验结果主要是对算法训练的性能参数做出整理,根据实验结果对算法的优劣性说明,对实验数据和实际检测效果进行分析。在相同配置环境下进行各实验,经训练后对各算法生成的权值文件进行测试。笔者将YOLOv8的前四种模型用于检测电动车佩戴头盔,分别是YOLOv8n、YOLOv8s、YOLOv8m和YOLOv8l,实验结果如表2所示。
分析表2可知,YOLOv8的四种模型中,YOLOv8m的mAP最高,因此可以得出,YOLOv8m是YOLOv8系列最适合用于电动车头盔检测的算法。
3 结束语
针对电动车骑乘人员不佩戴头盔等违法交通问题,本文提出基于YOLOv8的电动车佩戴头盔检测方法。实验表明,YOLOv8模型中的YOLOv8n、YOLOv8s、YOLOv8m和YOLOv8l模型中,YOLOv8m的检测平均精度均值mAP最高,适用于电动车头盔检测。由于距离、光照、天气、遮挡等原因,YOLOv8m算法在密集场景或者天气复杂的情况下检测精度还有很大的提升空间,在后续的工作中将对此进行进一步的深入研究。
参考文献:
[1] 市场规模近千亿 电动两轮车行业大起底[N].国际金融报,2021-07-12(12).
[2] 中华人民共和国工业和信息化部. 加强电动自行车行业规范管理 推动实现高质量发展[EB/OL]. [2024-03-10]. https://www.miit.gov.cn/xwdt/gxdt/sjdt/art/2024/art_2b7a188027d24d39bb064a876e9a2495.html.
[3] 李颖.“一盔一带” 严格执行电动车头盔成热购[J].中国质量万里行,2020(6):94-95.
[4] 庄建军,叶振兴.基于改进YOLOv5m的电动车骑行者头盔与车牌检测方法[J].南京信息工程大学学报,2024,16(1):1-10.
[5] 王新,冯艺楠.基于改进SSD的骑行人员佩戴头盔检测[J].电子测量技术,2022,45(21):90-97.
[6] 李强,赵峰,李博强,等.改进的Faster R-CNN算法及其在电力作业安全穿戴检测中的应用[J].武汉大学学报(工学版),2024,57(4):462-469.
[7] 吴冬梅,尹以鹏,宋婉莹,等.改进YOLO v4算法的电动车驾驶员头盔佩戴检测[J].计算机仿真,2023,40(3):508-513.
[8] 王艳鹏,王振亚,赵继红,等.基于轻量化YOLOv4电动车头盔检测的算法[J].自动化应用,2022(6):8-12.
[9] 朱硕,黄剑翔,汪宗洋,等.基于深度学习的非机动车头盔佩戴检测方法研究[J].电子测量技术,2022,45(22):120-127.
[10] 朱周华,齐琦.基于改进YOLOv5s电动车头盔的自动检测与识别[J].计算机应用,2023,43(4):1291-1296.
[11] 张潇艺,杨胜龙.基于YOLOv8的民用船舶影像分类方法研究[J].工业控制计算机,2024,37(4):72-73,76.
【通联编辑:唐一东】