基于投影栅相位法的强反射物体高动态三维测量
作者: 余钰洋 张芹 莫云杰
关键词:投影栅相位法;多曝光图像融合;强反射;高动态;三维重建
中图分类号:TP391.9 文献标识码:A
文章编号:1009-3044(2024)25-0114-03
0 引言
投影栅相位法三维重构是通过投影仪在所测元件表面投影出调制的条纹[1],基于计算机图像处理对在元件表面上由于元件轮廓变化发生形变的光栅条纹图,核心原理是通过投影仪在采集环境中根据图像灰度值自动调整亮度,使相机拍摄到的图像像素点灰度值分布均匀,从而计算得出准确的三维重构点云图数据[2]。国外有研究学者通过基于自适应算法对图像中漏光与暗部进行检测后调整亮度[3],从而得到成像效果好的条纹图,方法的不足之处是条纹图像是基于全局搜索匹配生成,导致图像中每一个像素点的值不能精确调控,数据处理过程复杂。传统多曝光融合技术应用在结构光重建中是基于动态图像融合的方式,通过实验控制相机的曝光时长与调整光圈范围得到条纹亮度不同的图像,再筛选出对重构测量有用的条纹图像,在形貌重构时选取每张图中位置相同的像素点,同时要求这一像素点的灰度值在最高同时无饱和现象。虽然多曝光图像融合在一定程度上消除元件强反射特性带来的失真问题[4],但在得到亮度不同的条纹图像过程中,需要人工调整采集参数,参数调整工作计算量过大,降低实验效率。同时融合后的图像依旧有过曝点存在,对原本暗沉区域的增益效果并不突出,对元件的重构后结果依旧有较大误差。
1 多曝光图像融合研究内容
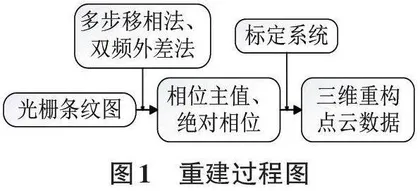
灰度值的测量区间由得到系统灰度响应的目标函数所确定,由像素灰度值与图像曝光时间的变换关系拟合得出目标函数[5],根据函数关系得出所需的拍摄曝光时间与图像数量,同时由目标函数得出相机拍摄照明亮度的区间,分别对在不同相机曝光时间下的成图使用白光照射制成掩模图,通过以上得到的条纹图与基于投射无条纹图产生掩模图的元素向量进行矩阵乘法叠加变换,在把矩阵乘法变换得到的条纹图以序列方式叠加后并进行归一化处理,使用伽马函数对其进行暗部处理后进行灰度值还原,得到适用于三维重建的条纹图像,通过相位解算和参数标定得到目标物的三维点云[6],重建流程如图1所示。
文中所确定元件在重构过程中的主要参数有灰度值与相机曝光的测量区间、相机拟合目标函数、相机曝光的时间与曝光次数、掩模制作、掩模图像与条纹图像序列相乘后进行线性变换、灰度值归一化处理、和伽马变换及灰度值还原具体包括[7]:
2 实验内容
本文实验所需的测量装置包括一台计算机,一台投影仪,一台工业CCD相机(CMOS)。实验测量对象为具有强反射表面的标准块参照块、实体1和实体2三种具有代表特征的零件。选择的曝光时间以及各参数如表1所示。融合后的图像如图2所示,重建结果如图3所示。其余参数均为默认设置。
3 讨论
本研究主要以确定灰度值与相机曝光的测量区间、相机拟合目标函数、相机曝光的时间与曝光次数、掩模制作、掩模图像与条纹图像序列相乘后进行线性变换、灰度值归一化处理和伽马变换及灰度值还原,从图2、图3来看,融合后的图像相位信息被较好在保存下来,对象表面三维数据被完整恢复出来。由上可见,与现有融合技术相比,本研究具有以下增益效果:
1) 有效解决传统多曝光融合技术由于融合产生新的过曝区域的不足。
2) 选择合适的系数可以提高条纹图像暗处的灰度值,保留了后续重建时暗处的细节。
本研究可应用于强反射物体的三维测量,扩大了结构光测量技术的适用范围。