基于改进NeRF-Navigation的移动机器人三维路径规划方法
作者: 杨铖 侯耀斐
关键词: 移动机器人; 三维路径规划; 三维重建; 医疗场景; NeRF
中图分类号:TP18 文献标识码:A
文章编号:1009-3044(2023)24-0014-04
0 引言
在移动机器人路径规划研究领域,构建精确稳定的三维环境地图对于机器人路径规划的成功至关重要,已引起国内外学者的广泛关注。但在动态变化场景中,机器人传感器位姿与场景的对应关系难以稳定,这给网格地图障碍物信息的感知分析带来了困难[1]。同时,由于机器人需要在不断变化的环境中获取实时的传感器数据并进行处理,以便于准确地更新自身位姿,在场景复杂、安全性要求较高时难以保证路径规划的实时性[2]。因此,路径规划方法需要在地图网格精度与路径更新实时性之间做出权衡。
早期的人工势场路径规划研究是针对静态环境而设计的,障碍物和目标物均被视为静态元素。然而,这种做法忽略了现实环境的动态性和变化性,因此不能适应复杂多变的实际场景。Fujimura等人[3]提出了相对动态的人工势场方法来解决移动机器人的动态路径规划问题,利用静态路径规划的思想,通过将时间视为规划模型的一维参数,实现了对动态环境下移动障碍物的处理。Ge等人[4]在吸引势函数中关联移动机器人与目标物的相对位置与相对速度,在排斥势函数中关联移动机器人与障碍物的相对位置与相对速度,提出动态环境下的机器人路径规划算法。马小陆[5]提出了基于势场跳点的蚁群算法, 该算法能够有效地减少收敛迭代的次数,缩短搜索收敛的时间,且搜索路径更优。
在实际工程应用中,运动目标的形貌、体积和姿态是路径选择的直接影响因素,面对三维复杂场景,越来越多的深度学习路径规划算法涌现出来。郑红波等人[6]在传统A*算法进行路径规划的基础上,提出了一种基于层次包围盒碰撞检测的实时路径规划优化算法,在时间效率和规划效果上都有一定的优势。Pinto等人[7]提出了一种新的视觉引导路径规划系统(V-GPP),它确定了一个无碰撞的三维轨迹,考虑了障碍与场景的相互作用。Smith等人[8]开发了一种新的基于启发式的多视点立体重建质量连续优化方法,并将其应用于路径规划问题,其规划速率达到毫秒级。Koch等人[9]提出了一个三维路径规划框架,设计用于详细和完整的小规模三维重建。Kompis等人[10]提出了一种在线路径规划算法,用于快速探索和规划先前未知兴趣区域的三维场景路径。
综上,三维场景下的路径规划需要考虑移动机器人本身位姿与环境之间的碰撞关系,以及移动轨迹与场景之间的相互作用。结合目前医疗环境所面临的配送迟缓性问题,本文将利用深度学习方法解决重建场景下的高效路径更新问题作为研究方向,在三维重建场景的基础上实现环境知情、安全和可解释的探索映射及路径规划。
1 NeRF-Navigation
神经辐射场(NeRF)是从观测图像中学习三维场景表征来进行新视图重建的神经网络模型,结构分为正余弦位置编码网络、特征提取网络和体积渲染网络,整体网络结构如图1所示。其中,特征提取网络包含两个MLP模型,一个为8层全连接的采样MLP模型,另一个为3层全连接的推理MLP模型。
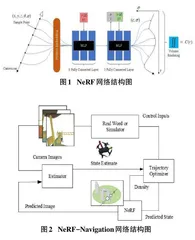
NeRF-Navigation是一种基于神经辐射三维重建的路径规划方法,该方法将NeRF生成的隐式采样模型等价为空间中网格的存在概率,从而使机器人可以在只使用单目相机视觉传感器的情况下进行导航。整体网络结构如图2所示,主要包括NeRF场景表示模块和机器人状态信息更新模块,通过预测机器人的轨迹生成控制指令。其中,轨迹预测和控制指令生成分别通过基于梯度的优化器和深度逆强化学习(DeepInverse Reinforcement Learning)实现。
为了更新规划路径,NeRF-Navigation制定了一个状态估计滤波器,当机器人根据控制指令运行一个时间步长后,估计器从机载单目相机获取一张当前视角的新图像,通过递归贝叶斯滤波方法传播估计结果与不确定性建立动力学模型联系。同时,使用图像特征检测器(如ORB)识别特征点,使机器人转向更高梯度信息的区域周围进行采样。
2基于改进NeRF-Navigation 的三维路径规划
本文关注室内环境移动机器人的路径规划,对于给定起始位置与目标位置,在三维网格地图中使用A*搜索初始化路径,并采用一个适用于移动机器人的三自由度姿态过滤器来跟踪初始化轨迹。NeRFNavigation根据每个时间步长中可用的有限信息控制移动机器人进一步的行为决策,本文在每一步的规划中,引入贪婪信息增益策略,对于一组采样点N,通过比较其与当前姿态连接的行为效益,选择生成路径的最佳视角;同时,使用动态权重的启发式函数提高路径搜索效率。通过两种策略的结合使用,提出一种具有隐式环境适应的动态加权A*路径规划方法,网络结构如图3所示:
2.1 贪婪信息增益策略
在基于采样的规划中,移动机器人以当前姿态的地图空间视角为观测图像采样视点,通过计算每个视点的信息增益、消耗成本确定最终组合效益,约束当前节点的视角指向最佳候选点并执行动作,从而提高搜索的准确性和效率。
本文使用上述两种策略共同作用以达到平衡路径代价和平滑程度的目的,鼓励移动机器人优先考虑高确定性预测区域,使其隐式地适应环境的类型。例如,在直线走廊中,机器人倾向于沿中心直线移动,因为这可以最大程度地观测到直线走廊的全貌;而在障碍物较多的复杂场景中,机器人倾向于沿障碍物采样点占比较大的观测视角方向移动。此时,移动机器人能在未知其所处环境的情况下选择一条较优路径。
3 实验结果与分析
为验证本文改进方法的有效性,在实验室大型室内场景、观察病房走廊纵深场景、一号病室中型室内场景和治疗室小型室内场景中,将所提方法与NeRFNavigation算法进行了比较,不同网络的重建场景路径规划结果如图5所示,左侧图像为原始算法的路径规划结果,右侧图像为改进算法的路径规划结果,与结果相关的定量指标见表1,采用加粗字体表示较优指标。
图5展示了实验室场景、观察病房走廊场景、一号病室场景和治疗室场景下的三维路径规划定性结果,图中第一列为NeRF-Navigation路径规划结果,第二列为本文所提方法路径规划结果。由图中4种类型的重建场景路径规划对比结果可以直观地看出,相较于原始算法,本文改进算法可以实现较为平滑的更新路径。在相对空旷处,改进算法更倾向于朝前进方向沿直线规划;在避障转角处,改进算法能规划出较为平滑的曲线路径,且4类场景都能保持较优的路径覆盖,证明了所提算法的有效性和鲁棒性。
表1展示了原始NeRF-Navigation与本文改进方法的综合性能对比,包括成功路径实现(SPL)、路径初始化时间、姿态估计时间和路径更新时间。由表中数据分析可知,相较于对比实验组,本文改进方法以平均0.2s的姿态估计时间增量换取了平均-3.5s的路径初始化时间增量和平均-0.8s的路径更新时间增量,且成功路径实现的比例提高了13%,在所有实验场景下的性能指标均优于对比实验组,这表明本文所提网络较对比网络能有效提升重建场景下的路径规划性能。
图6展示了实验室环境下移动机器人在同一位置的姿态估计准确性,左图代表原始算法,右图代表改进算法。因实际路径点不同,故难以选取完全一致的观测角度,这里选取二者实际路径上的接近路径点进行对比,蓝色曲线表示实际姿态,橙色曲线表示估计姿态。实验结果表明,改进算法实现了更贴合实际的姿态估计,可增强路径更新的安全性与效率。
4 结论
针对医疗环境光线行进较为复杂的特点,本文使用Nerfstudio框架对重建场景边界进行限定,生成了高保真的三维网格地图作为三维路径规划的基础。在NeRF-Navigation的基础上,提出一种具有隐式环境适应的动态加权A*路径规划方法,并在实验室场景与自建医疗场景进行改进算法的实验训练与测试。实验结果表明,本文所提方法的三维路径规划各项评价指标相较于NeRF-Naviga⁃tion均有提高,能有效降低规划路径的曲率,提高规划效率,可以用来指导机器人在不同类型医疗场景下进行自适应三维路径规划,即使在复杂的环境中也能显示出可靠的路径覆盖。