基于模糊理论的车型识别技术研究
作者: 李旭茹
关键词:不停车收费系统;图像识别;车型识别;模式识别;模糊理论
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2023)24-0024-03
0 引言
图像识别是指利用计算机技术对图像进行分析和理解,以识别各种目标和对象[1]。随着计算机的快速发展,图像识别技术在现实生活中扮演着越来越重要的角色。在农业中,为了给虚拟作物的研究提供依据,可利用图像识别技术分辨作物的类别、作物的生长状况、农作物中病虫害的图像诊断等[2],图像识别技术还广泛地应用于煤仓煤位监测、变电站智能巡检、故障远程监测系统等[3-5]。
本文研究的车型识别是图像识别的一支,是ETC 系统重要的组成部分。目前常见的射频识别(Radio Frequency Identification,RFID)电子标签是粘贴于车辆前挡风玻璃上,该电子标签上有存储设备,将用户的信息,如:车牌号、人民币余额、车辆所属的类型等集中存储,读写器接收标签内存储的信息是通过无线、不接触的方式[6]。但在实际应用中,有的车主将RFID 电子标签中的信息私自变换,达到逃避缴费的目的,这种情况加大了管控难度。为了解决此问题,引入基于图像的车型自动识别系统非常迫切。
目前,深度学习技术蓬勃发展,对车型识别等方面的相关研究也发展起来,但是深度学习需要有大量的训练样本,实际操作中难以广泛推广和应用[7-8]。本文将模糊理论应用于车辆识别,这种模式简单方便、易于推广和操作。具体过程为当贴有电子标签的车辆经过收费站,系统将提取车辆的有效信息,并自动比较提取的信息与电子标签存储的信息,结果一致的,进行自动扣费并起杆放行;对比结果不一致的,系统自动进行逃费违法行为抓拍。将本文算法应用于实际车型识别中,结果证实算法可行。
1 模糊理论的车型识别
目前,国内外对车型的模式识别还处于探索和发展阶段,相关研究比较少,仅有的研究成果也是在模板匹配和神经网络下的车型模式识别,难以广泛推广和应用。故而本文从实用性角度出发,提出应用模糊理论对车辆进行识别,便于推广和操作[9]。
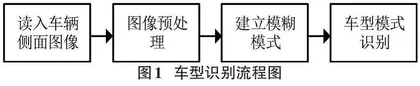
在实际操作中,车辆在行进中是运动的,运用模糊理论的车型识别方法,通过外部安装的图像采集器拍摄两个时刻同一位置的车辆侧面照,然后将获取的图像信息存储到存储器,提取车辆轮廓和相关信息,再把数据传输到识别模块进行模糊模式识别,流程如图1所示。
1.2 建立模糊模式
我国对汽车的分类有严格的标准,根据最新的标准,可以将汽车分为:轿车、客车、越野车、牵引车、载货汽车、挂车[10]。这几种车辆类型无论外观和尺寸都有非常大的区别,但仍可以以像素为单位,将车辆外轮廓的顶部长度(记为T)与底部前后车轮间离的比值(记为B),还有车辆轮廓的顶部长度与车辆顶部到地面间距(记为H)的比值建立模糊子集,加以区分以上几种车辆,也就是利用T/B和H/B的值来区分。
首先,通过T/B的比值判断,客车一般在1:1以上,载货汽车、牵引车、挂车三种类型一般都在2:5以下,轿车和越野车的介于其中。那么区分以上三类车型可以在最大隶属原则下进行第一次模糊模式识别;然后根据H/B进行第二次模糊模式识别区分轿车和越野车,依然运用最大隶属原则。区分载货汽车、牵引车、挂车的同样适用上述方法。
具体方法为:首先把T与B的比值作为论域1,记N1=T/B,显然0<N1<2,并建立3个模糊子集,论域1的模糊子集如表1所示。然后再把H与B的比值作为论域2,记N2=H/B,显然0<N2<2,并建立5个模糊子集,论域2的模糊子集如表2所示。
为6种车型建立隶属度函数,公式见式(3)~(10) 所示。
2实验结果与分析
本文采用Matlab编程对图像处理,选取轿车做实验验证。车辆经过收费站时是运动的状态,为了能够捕捉经过车辆的特征,可通过外部辅助拍摄设备拍摄同一位置两个时刻的车辆侧面照,以轿车为例拍摄照片,如图3、图4所示。
首先,对车辆进行边缘检测,可以得到车辆的轮廓信息,但在图像中有一些不连续的线段,影响特征值的提取。可采取闭操作,光滑一些不连续的线段。闭操作之后得到的图像如图5所示。图中的图像边缘是由单像素组成的细线,便于获取目标特征。本文要提取的特征是前文已引入的三个距离T、B、H的值。
最后,本文设计了一个GUI界面,用来显示最后的识别结果,如图6所示。
3 结论
本文提出了一种基于模糊理论的车型识别技术,并通过实验进行验证。结果表明,该算法是可行的,可以实现车型的识别。但是该识别方案仍存在不足,比如在牵引车、半挂车等车型还未能实现完全识别。下一步将优化算法,使识别的范围进一步扩大,适用性更广。