塔台管制自动化系统与空管自动化系统C类移交研究
作者: 崔品品
摘要:该文旨在通过对塔近分离和塔近一体的塔台管制自动化系统与空管自动化系统之间的数据交互研究,明确不同管制范围的塔台管制自动化系统与空管自动化系统之间的移交模式,探索C类移交在空空移交和空地移交情形下的不同实现方式,为塔台管制自动化系统建设期间与空管自动化系统之间的移交设计提供参考。
关键词:塔台管制自动化;C类移交;电子进程单;地面状态
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2023)30-0085-03
开放科学(资源服务)标识码(OSID)
0 引言
随着各地机场规模的不断扩大,塔台信息系统的数量日渐增加,不同的系统使用各自的人机界面,各系统间缺少足够的数据交互,同时信息综合利用程度低、席位工作环境混乱。因此,对塔台信息系统进行集成,建立塔台管制自动化系统成为目前塔台建设的主要思路。
由于各地管制范围划分的差异,有些地方的机场塔台管制范围包含全部或部分进近空域,如湛江、鄂州等地。有些较为大型的机场塔台管制范围仅包括机场场面和五边区域,如广州、成都等地。由于塔台管制自动化系统作为单独的一套自动化系统,应自行处理飞行计划数据。且目前塔台不再建设空管自动化系统的延伸席位,因此,塔台管制自动化系统与空管自动化系统之间不可避免地出现了飞行数据移交的管制业务需求。此外,有些现场的塔台管制和机坪管制分离,机坪管制也可能会有自己的一套自动化系统,在这种情况下,塔台管制自动化系统与机坪管制自动化系统也会需要进行移交,但是这种属于地-地移交,类似于电子进程单系统的地面状态流转,相对较为简单。而塔台自动化和空管自动化系统之间的移交区别于传统的不同管制单位间移交(如AIDC) ,且不仅仅包含目前的进近对区调的空对空C类垂直移交。
在目前管制单位间所用移交方式的基础上,本文基于不同的场景需求,致力于研究塔台管制自动化系统与空管自动化系统之间的特殊移交模式,尤其是塔近分离的塔台管制自动化系统与终端区空管自动化系统之间的C类移交,进而为塔台管制自动化系统的后续系统设计和建设提供一定的理论基础。
1 塔台管制范围和与空管自动化系统移交的关系
1.1 塔进一体与塔进分离
塔台管制单位负责对本塔台管辖范围内航空器的推出、开车、滑行、起飞、着陆和与其有关的机动飞行的空中交通服务。规章要求,全年起降架次超过36000架次或者空域环境复杂的机场应当设置进近管制单位,进近管制空域垂直范围通常在6000米(含)以下最低高度层以上,机场管制地带通常包括起落航线和最后进近定位点之后的航段以及第一个等待高度层(含)以下至地球表面的空间和机场机动区。
所以,塔进一体的管制单位一般指全年起降架次较少,塔台负责机场管制地带和部分进近管制空域,其与空管自动化系统间属于空对空垂直移交的关系;塔近分离的管制单位塔台仅负责机场管制地带,其与空管自动化系统间属于地对空垂直移交的关系。
1.2 FDE C类移交
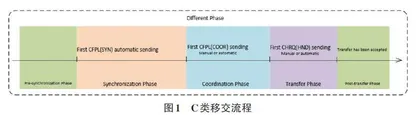
塔台管制自动化系统与空管自动化系统之间的移交,不论是塔进一体时的移交场景还是塔进分离时的移交场景,都属于典型的垂直移交。目前,关于垂直移交方面的研究,我国已有了自有电子移交电报标准,即基于飞行数据交互的空管自动化系统间管制移交FDE(4029.3C类移交)[1],目前已在国内多个现场根据各地实际情况进行了垂直移交方面的应用。比如广州终端区和广州区调之间基于FDECM[2]的移交,经相关一致性检查、同步、协调、移交等标准过程,本质上属于空对空的移交。此外,在西南地区现场与管制区范围内中小机场之间存在更为简单的FDE应用方式,只包含移交阶段,此部分可涉及地对空的移交。因此,垂直移交在实现方式上较为灵活,一般基于4029.3的C类移交,通过FDECM报文实现。
飞行数据交换C类电报由4种电报构成,业务流程包含2个阶段,分别为协调阶段和移交阶段。在报文语义和语法方面,飞行数据交换C类电报采用了ADEXP格式。通信协议方面,大部分应用使用TCP/IP协议[3]实现点对点通信。
在最新的关于民用航空空中交通管制自动化系统数据交换规范中定义,自动化系统间的数据交换报文分为5类,分别为系统通用数据交换报文、基础飞行数据交换报文、环境数据交换报文、管制业务数据交换报文,流量信息数据交换报文。塔台管制自动化系统进行飞行数据交互的外部系统,均需支持通过相互循环发送SHBT心跳报文判断两系统间数据传输是否正常;塔台管制自动化系统通过管制业务数据交换报文实现与空管自动化系统电子化移交、与空管自动化系统或者第三方系统实现SSR报文的申请和分配。
虽然塔台自动化系统和空管自动化系统之间的移交大体上仍然属于垂直移交的范畴,通常需遵守FDE移交方式,但FDE移交的实现较为灵活,且鉴于塔进一体和塔进分离管制范围的不同,与空管自动化系统之间的垂直移交方式也会相应地有较大区别。下面分别进行分析研究,尤其是塔进分离情况下,垂直移交处于不同自动化系统间地空移交的范畴,就未来的规范化移交使用方面,更有研究价值。
2 塔进一体的塔台管制自动化系统与空管自动化系统间的FDE移交
塔进一体的塔台管制自动化系统与空管自动化系统之间的移交本质上类似于进近-区调之间的空对空垂直移交,如湖北的鄂州机场集成塔台系统与武汉终端区空管自动化系统之间、湛江的吴川机场塔台管制自动化系统与湛江终端区空管自动化系统之间所采取的,就是基于空对空移交。
根据现行的管制移交协议,高低扇区的移交也会在一个固定的点完成。这个固定点与扇区间的高度分界线形成了空间上唯一一个移交点,因此高低扇区移交并不是真的无固定点,可基于移交点前VSP时间开始协调。其次,4029.3C类移交标准运行实质是电报内容并不传递移交点和过移交点时间,仅包含移交的管制指令,可以避免不准确的数据影响飞行数据内容的情况。
FDECM接口上的MH/T4029.3[4]消息具体的报文内容如下:
CFPL:完整的飞行计划信息,包括ICAO字段和其他字段
–SYN:用于同步
–COOR:用于协调
–CNL:用于取消协调
CHRQ:移交请求
–HND:发起移交请求
–CNL:取消正在进行的移交请求
CHRP:对 CHRQ HND的响应消息
–ACP:接受移交请求
–REJ:拒绝移交请求
CLAM:收到CFPL COOR CFPL CNL CHRQ CHRP的确认
综上分析,塔进一体的塔台自动化系统与空管自动化系统之间,根据各地管制的实际需求,在确定好移交点或上下游的管制边界的前提下,采用标准模式的FDE C类移交或者简模式的C类移交即可实现。
3 塔进分离的塔台管制自动化系统与空管自动化系统间的FDE移交
从管制工作流程而言,塔进分离的塔台管制自动化系统与空管自动化系统之间的移交、属于地面-空中的移交,有两项特点:
1) 航班从地面起飞到进近管制,其时长特别短。就广州现场而言,目前地面航班经塔台电子进程单TOMS系统完成塔台的管制流程后,起飞升空,进近的空管自动化系统界面一出现目标,正常情况下立即自动相关并直接归进近管制。
2) 地空移交虽然也可以设定固定的移交点,但就离港航班,若基于普通的空对空移交而言,设定距离移交点前VSP时间开始C类[5]协调无法实现,因为塔进分离塔台管制自动化系统一般不进行4D剖面计算,且其前期大部分时间属于地面滑行和等待,根本无法提前判断准确的到点时间,航班动作必须基于地面管制和塔台管制的指令。
因此,对于塔进分离的塔台自动化系统而言,研究航班的地面生命周期状态、准确把握航班的管制流程阶段,在地面的生命周期状态的基础上通过地面状态触发实现地面-空中的C类移交是比较可行的方式。
3.1 地面生命周期状态
塔台管制自动化系统的航班,塔进分离不考虑飞越计划的前提下,其飞行计划的流转从大类上分为进港航班和离港航班。因此,其地面状态的飞行计划生命周期可从进港航班生命周期管理和离港航班生命周期管理两方面来分析。
在塔台管制自动化系统建设之前,大部分塔台管制航班的地面生命周期状态基于塔台电子进程单TOMS系统,通过席位电子进程单的状态的变化和管制指令的变更实现地面状态的流转,但是这种流转仅限于塔台电子进程单的系统内,并未与外系统(如空管自动化系统)有移交飞行数据等方面的交互,有些现场即使可通过EST报文向空管自动化系统发送协调报文,但后期也可能会引起空管自动化系统的一些相关异常的问题。因此,电子进程单的状态的流转不等同于塔台管制自动化系统地面飞行计划生命周期管理。
按照塔台管制自动化系统最新的试行规范,离港和进港航班生命周期的设计流转如图2和图3所示。
由图2和图3可知,通过地面状态生命周期管理,将塔台管制自动化系统航班在系统内部的状态流转和对外的飞行数据交互进行了有机的串联。在各个地面状态的基础上,塔台管制自动化系统可以完成丰富的管制工作流程,如SSR的申请和分配、跑道和SID的分配、对外飞行数据的移交与接收等内容。
1) 系统的SSR分配:按照空管自动化系统现行的SSR分配原则,系通过飞行计划生命周期处于预激活状态的时候由空管自动化系统自行完成二次代码的分配。而在塔台管制自动化系统中,系统可以自动分配SSR,也可以同多第三方系统统一分配SSR。塔台管制自动化系统向SSR分配系统申请SSR的分配。为了提高SSR的利用率,考虑到塔台自动化系统中的预激活状态相对较长,因此可不基于预激活的状态,而是基于地面生命周期的申请放行状态,自动触SSR的自动分配或者通过第三方系统使用C类管制业务交互报文(CSRQ,CSSR,CMAC) 实现SSR的分配。
2) 地面-空中的C类移交的实现:基于地面状态的触发来实现C类移交的协调、移交动作。
3.2 离港航班地空移交设计
对于塔台现场而言,地空分离的塔台有些还会建设机坪自动化系统。因此,塔台的离港航班从未激活到起飞依次经历的系统为塔台管制自动化系统——机坪自动化系统——塔台管制自动化系统——终端区自动化系统——区域自动化系统。通过研究塔台管制工作流程以及各个时间节点,本阶段所涉及的场景类型大概包括正常离港、中断起飞后再次离港等操作。设计离港航班的流转和移交流程如图4所示。
通过研究管制工作流程,C类移交的协调阶段,在地面进入LIN(允许进入跑道)状态的阶段开始进行CFPL的COOR报文协调。对于管制要求较高的现场,若实现离港航班地空自动移交,可对ARN升空状态定义相关参数概念,如加入离地高度判定条件,航班一进入对应的离地高度进入ARN状态,即触发塔台管制自动化系统向终端区自动化系统发送CHRQ报文,进而实现离港航班向终端区自动化系统的自动移交。移交的管制标牌变化和脱波流程可参考空空C类移交的模式。
在离港移交的实现方面,可通过离线配置实现塔台管制自动化系统的塔台席向终端区空管自动化的离港DEP席位移交。
3.3 进港航班地空移交设计
对于进港航班而言,按照最新的民用航空空中交通管制自动化系统数据交换规范,使用指导手册意见,在塔台管制自动化系统和空管自动化系统处于关联模式运行的时候,飞行计划信息以空管自动化系统为主,因此,在航班从终端区向塔台协调的阶段,可通过相关一致性检查和自动修改实现终端区和塔台飞行计划的同步。在移交的设计上,按照管制终端区向塔台移交的流程实现手动移交。手动移交和手动接收的原因为进近管制必须进行移交脱波,塔台管制必须进行移交接收的人工确认动作。
在此阶段,应用场景包括正常进港、复飞、接地复飞等内容,不同的场景报文流转如图5所示。
4 结论
本文通过研究不同管制范围塔台管制自动化系统与空管自动化系统之间的管制流程以及塔台管制自动化系统中航班的生命周期状态流转,设计了塔台管制自动化系统进离港空地/地空移交的实现方式。计划在后续的研究和建设过程中,更进一步地明确各个地面状态的相关动作,明确具体飞行数据项的交互方式。基于本文的理念搭建建设框架,在建设的过程中丰富研究的细节,从而形成更加具有指导意义的研究成果。
参考文献:
[1] 李智.航管自动化系统之间增强型飞行数据交换(FDE)方案[J].电子技术与软件工程,2017(15):46.
[2] 陈丹伶,罗煊.空管自动化系统管制电子移交技术浅析[J].科技传播,2022,14(4):131-134.
[3] 林加.不同空管自动化系统之间的电子移交[J].电子技术与软件工程,2016(17):131-133.
[4] 庄青,雷馥鸣,叶鑫鑫.基于MH/T4029.3标准的管制移交技术应用进展[J].航空计算技术,2021,51(3):131-134.
[5] 邹国政.空管自动化系统采用C类报文的飞行数据移交设计[J].中国科技信息,2021(6):20-22.
【通联编辑:代影】