一种双船体结构的水面智能清道夫设计
作者: 冯登财 朱翔 乐明于 吴伟
摘要:一种双船体结构的水面智能清洁船针对水面环境污染的问题,主要致力于中小型湖泊河流等水域的固体垃圾清理,如塑料袋、饮料瓶、树枝树叶以及其他易清理的水面垃圾。文章主要对其进行了船体结构、动力装置、打捞装置、垃圾存储装置,控制系统以及监控云平台的设计,设计了一种双船体结构的水面智能清洁船,都使得水面垃圾的清洁更加有效率。
关键词:水面垃圾;视觉分析;双船体结构设计;云平台
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2023)30-0092-03
开放科学(资源服务)标识码(OSID)
0 引言
随着社会经济的飞速发展,往往忽视了对环境的保护,这就使得近几年来世界水资源质量不断下降,水环境持续恶化,越来越受到人们的关注。河流、湖泊里的漂浮垃圾的污染已经逐步影响到市民的饮水、环境卫生及市容市貌。
内陆湖泊垃圾无法有效清洁主要因为:内陆湖泊的地形复杂,湖区水流形态多样,不同水域深度不一,水草茂盛,水动力条件不同,这些因素都会影响垃圾的分布和清洁难度。而且内陆湖泊周围多为城市或农村,人口密集,人们流入垃圾的渠道很多,其中,固体垃圾是主要来源。对于内陆湖泊的垃圾清理而言,实用的技术和设备并不充足,夹板船等传统工具效率低,电动船等新型清洁设备相对价格昂贵,不能全面地覆盖到需要清理的区域。缺乏有效技术和设备。因此,为了有效清洁内陆湖泊垃圾,提高湖泊垃圾清理效率,本文设计了一种新型的双船体结构的水面清洁机器人。
1 系统总体设计与阐述
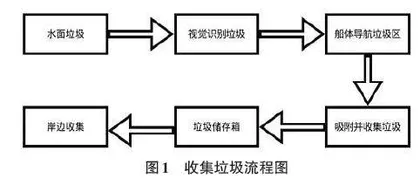
该船主要由船体、动力装置、船体结构、驱动装置、垃圾清洁装置和智能控制装置组成。船体结构包括第一船体和第二船体,还有可拆卸收集网和固定板。驱动装置由能源装置和推进装置组成。垃圾清洁装置包括可拆卸收集网和拉力传感器。智能控制装置包括摄像头模块、单片机、物联网通信模块、温湿度传感器和风速传感器。垃圾清洁是通过船体间的叶轮造流,将船体前方的垃圾吸入垃圾收集区,再传输压缩至垃圾储存箱中。等垃圾收集任务完成,船体泊岸后,从岸边把垃圾仓打包运走,收集作业完毕。作业流程如图1所示。
1.1 船体结构设计
第一船体和第二船体的长度和宽度相同,中心线对称,船体底部采用双弧形设计,增强船体稳定性和降低水阻。第一船体和第二船体的上部边缘设置护舷,保护船体和垃圾清洁装置,并增强船体强度。垃圾区利用船体间的叶轮造流将垃圾吸附到中间的可拆卸收集网中,收集网采用网格设计,能够有效收集和过滤垃圾同时减小水流阻力。拉力传感器安装在可拆卸收集网上方,能够测量垃圾清洁装置的拉力,确保垃圾清洁装置工作安全。
固定板采用高强度材料制造,能够承受垃圾清洁装置的拉力和船体的稳定性,同时固定板上方搭载智能控制[2]装置,包含摄像头模块、单片机、物联网通信模块、温湿度传感器、风速传感器等多种传感器和控制模块,可以实时监控船体的运行状况和垃圾清洁工作的进度,为操作人员提供必要的数据支持,确保工作的高效运行。同时,智能控制装置还可以自动化控制船体的航行轨迹和垃圾清洁的区域,避免操作人员疏忽或出错造成的损失和延误。驱动装置包括能源装置和推进装置,能源装置采用太阳能和电池供电,能够满足船体长时间的运行和垃圾清洁工作。推进装置采用防缠绕型螺旋桨,能够提供强大的推进力和灵活的航行性能。整个装置的结构简单,操作方便,具有高效率、安全、可靠等多种优点。如图2所示。
本设计采用双船体用于水面清洁主要是因为其有这几大优点:提供更多的自由空间更宽的工作面积:传统的单体船只能在水面运行,受限于船身大小和水深等限制,无法进行大面积清洁工作,所以清洁效率和速度比传统船只更高。而双船体结构可将清洁设备放置于连接架上,在水下进行清洁,从而大大扩大了清洁面积和深度。更加安全可靠和稳定:由于双船体结构采用支撑架连接两个船体,使得整个船身更加稳定、安全,而能够更好地应对湖面波动的情况,保证安全地航行,更好地应对复杂环境下的垃圾清理工作。更高的载重能力:双船体结构可以增加船只的载重能力,从而能够搭载更多的设备和工具进行湖面垃圾的清理工作。双船体设计也可以减小船体的水阻,提高航行速度和效率。同时,收集垃圾的方式为自然漂浮方式,无须额外能源,也能避免污染排放。尾部垃圾收集器采用耐用的材料制作,结构简单,清洁方便,降低维护成本。因此,双船体结构是一种更加高效、安全、环保的清洁湖面垃圾方法,将在未来得到越来越广泛的应用。
1.2 硬件与功能设计
1.2.1 视觉识别
本设计利用OpenMV[3]识别垃圾、GPS定位船体和垃圾位置并自动绘制寻迹路线,完成清理垃圾。首先利用OpenMV识别垃圾:利用OpenMV的识别算法的图像处理技术,先手动采集一些带垃圾的水面图像,将其传输到OpenMV开发板中,训练OpenMV识别特定的垃圾。当OpenMV拍摄到垃圾时,可以进行识别和分类,判断是否需要清理。使用OpenMV的图像分析模块,将图像切割并分析出每个垃圾的位置。为每个垃圾分配一个ID.将所有带垃圾的图片经过这个流程的分析,得到包含每个垃圾所在位置和对应ID的位置列表。如图3所示。
1.2.2 自主导航
该功能是双船体湖面垃圾清洁船可根据垃圾设定的路线和任务自主导航,无须人工控制。为了让无人船能够清理垃圾,需要对无人船进行导航[4],从而能够在水面区域自主寻找带有垃圾的区域。这就需要用到GPS定位的功能。在船体上安装GPS定位装置,通过GPS定位船体和垃圾位置,在OpenMV中配置相应的GPS通信协议,能够实时获取船体和垃圾的位置信息。OpenMV获取无人船当前的GPS位置。检查每个垃圾所在的位置,并计算船体和每个垃圾的距离。通过分析距离和垃圾分配的ID,生成包含船体和每个垃圾所在位置的列表。如图4所示。
为了让无人船按照规划好的路线清理垃圾,需要生成一条适合无人船的寻迹路线。首先需要对当前位置和垃圾位置进行定向。创建一个二维平面坐标系用来表示船体和垃圾的位置信息。利用获取到的位置信息,利用算法和数学计算,计算出船体前进方向与目标垃圾的夹角,然后得到船体需要前进的方向。将前进的方向向船体前进方向修正,得到更加适合无人船实际运动的方向。随着前进的距离和新的位置和船体位置的关系发生变化时,重复这个步骤,直到完成整个路线的规划。
1.2.3 垃圾清洁
该功能是机器人通过集成各种垃圾清理器材和设备,实现湖面垃圾的自动清理和处理。湖面清洁船[5]用尾部的网笼型内部压缩垃圾,是一种专门用于清理湖泊和水体中垃圾的船只。其尾部装有一个网笼型装置,可以将浮在湖面或水体中的垃圾捞起来,然后把垃圾放入内部压缩装置中进行压缩处理,使得垃圾的体积大大减小,从而更方便地收集和处理。
尾部垃圾收集器采用网笼设计,可保证垃圾被牢固固定,避免因垃圾移动而导致的危险情况。这种结构具有几点好处。高效清洁:尾部网笼型垃圾收集器可大量收集污染物质,清洁效率高。多功能协作:尾部垃圾收集器采用可拆卸形式,可以与其他清洁设备协同工作,如边界清洁用具、电子控制系统等,提高清洁效率和质量。同时,该设备还可以对收集到的垃圾分类、压缩等处理,减少废弃物的体积和对环境的影响,提高资源利用率。如图5和图6所示。
当无人船到达目的地时,需要使用叶轮造流来清理垃圾。为检查垃圾是否进入收集区,在机械臂中安装一个摄像头,检查垃圾是否清理干净。同时当收集区的压力传感器警报时船体则自动返航。到达岸边完成垃圾的清理。垃圾清理流程图如图7所示。
这些步骤结合起来,就能够让无人船和OpenMV实现自动识别垃圾定位船体和垃圾的位置,自动规划寻迹路线和清理垃圾的功能,这样,极大地减少了人的干预,提高了清理效率,也为环境保护出了一份力。
1.2.4 多功能性
该功能是利用云平台可监测湖内水质和辅助清理污染物。无人船上的传感器和云平台可以实现湖泊质量监视[6]的实时化、高效化和智能化。比如需要监测的指标,例如水温、水质、溶解氧、pH值等。然后根据指标选择相关的传感器,并将其安装在无人船上。设置数据采集频率和时长等参数,以确保数据采集的准确性和可靠性。
再利用物联网通信模块,能够将采集的数据实时传输到云端,方便管理和监控。建立数据传输通道,将传感器采集到的数据通过蓝牙、Wi-Fi等方式传输给云平台。云平台将海量的数据进行处理和分析,提取有用的信息和数据趋势,并生成可视化的报表和图表。通过对数据的分析和处理,实时监测湖泊质量变化,并及时发出告警或预测。此外通过数据分析和可视化报表,优化湖泊管理策略,提高湖泊水质;并为决策者提供可靠的参考依据。
值得注意的是,操作人员需要定期对传感器进行检修和维护,保证监测数据的准确性和可靠性。另外,通过云平台的数据可对垃圾收集区进行拆卸,装配需要的控制器实现智能操控改善水质或者投放物料等操作,大大降低人工投入成本和提高自动化能力。具体的云平台控制图如图8所示。
2 总结
该垃圾清洁机器船的使用非常方便,只需启动机器船上的控制装置,便能够自动制定出最适合的路线进行清洁。同时,在收集垃圾时,可拆卸收集网能够快速收集,拉力传感器也能够准确判断收集网是否已满,并及时通过物联网通信模块向云端发送信息通知用户处理。通过船体上的多种传感器检测水体质量,改变垃圾区的模块结构完成多种功能,用于水面多种环境,是一个双船体结构的水面智能清道夫。这种智能化的设计,不仅大大提高了清洁效率,还减少了人力和物力的浪费。
最后,需要强调的是,内陆湖泊垃圾无法有效清洁的问题需要持续的关注和解决。政府、社会团体和公民个人都必须采取行动,共同努力解决这一问题。只有通过有效的合作和协调,才能确保内陆湖泊的垃圾可以有效地清理,保护内陆湖泊的健康和生态系统的平衡。
参考文献:
[1] 张凯淇.一种节能环保型水面垃圾清理船设计[J].现代制造技术与装备,2020(3):15-17.
[2] 罗焕新.一种水面清洁机器人控制系统的设计[C]//2011年机械电子学学术会议论文集.西安,2011:165-168.
[3] 王梁,韦春明,陈俊洁.基于OpenMV图像识别的垃圾分类小车系统设计与实现[J].河南科技,2022,41(18):15-20.
[4] 邓文斌,韩耀强.移动机器人视觉跟踪系统的开发[J].嘉兴学院学报,2023,13(4):1-5.
[5] 华洵,曹雪花.基于arm的水上垃圾清理机器人设计方法[J].电脑知识与技术,2019,15(1):237-239.
[6] 沈攀.水面清洁机器人远程监控系统的设计与实现[D].杭州:杭州电子科技大学,2019.
【通联编辑:梁书】