一种基于高精度数学地平的惯性/天文组合导航方案
作者: 袁丁 王新龙
摘 要: 惯性/天文组合导航具有自主性高、 抗干扰能力强的优势, 在弹道导弹、 空天再入式飞行器的导航任务中具有重要的应用价值。 在传统惯性/天文组合导航系统中, 惯导提供的数学地平误差随时间发散, 导致天文定位精度逐渐降低, 进而造成惯性/天文组合导航系统长时间工作时定位精度严重发散。 为此, 本文给出了惯导系统提供数学地平的机理, 分析了数学地平精度与天文定位误差的耦合关系, 建立了惯导误差与数学地平精度的关系模型, 提出了一种高精度数学地平获取方法; 在此基础上, 设计了一种基于高精度数学地平的惯性/天文组合导航方案。 利用高精度数学地平获取天文观测角, 引入高度计获取不随时间发散的高度信息, 实现了对组合导航误差的全面估计与校正。 仿真结果表明, 与传统方法相比, 所提方法通过抑制数学地平误差发散, 能够显著提高组合导航精度, 满足再入式飞行器长时高精度导航的需求。
关键词: 惯性导航; 天文导航; 组合导航; 数学地平; 天文观测角; 高度计
中图分类号: TJ760; V249
文献标识码: A
文章编号: 1673-5048(2024)06-0120-07
DOI: 10.12132/ISSN.1673-5048.2024.0124
0 引 言
弹道导弹、 空天再入式飞行器作为主要的战略/战术武器, 对其导航系统的自主性、 精确性和抗干扰能力提出了越来越高的要求。 目前, 常用的自主导航方法主要有惯性导航、 天文导航等[1]。
惯性导航具有短时精度高、 输出信息连续、 抗干扰能力强、 导航信息完整、 可全天候工作等优点, 但是其导航误差随时间积累[2]; 天文导航可提供姿态和位置信息, 定姿精度高、 自主性强、 抗干扰能力强, 但也存在输出信息不连续、 易受气象条件影响等问题[3]。 可见, 惯性导航和天文导航具有较强的互补性。 因此, 将惯性导航系统与天文导航系统的信息进行有机融合, 构成惯性/天文组合导航系统, 可以实现优势互补, 满足再入式飞行器对导航系统的需求。 惯性/天文组合导航系统的导航信息完备性、 自主性和可靠性, 使得惯性/天文组合导航在再入式飞行器的导航系统中具有广阔的发展前景 [4-6]。
天文导航系统利用星敏感器观测恒星, 可以获得不随时间发散的高精度姿态信息, 一般可达到角秒级[7-8], 进而利用高精度姿态信息对惯导系统的姿态误差进行校正, 可以获得较高的组合导航定姿精度[9]; 但天文导航系统进行定位解算时需要利用惯导系统提供的数学地平信息[10], 因此数学地平的精度会直接影响天文定位的精度, 进而影响组合导航系统的定位精度[11]。 受惯性器件误差影响, 惯导系统提供的数学地平误差随时间发散, 导致天文定位的精度降低, 最终造成惯性/天文组合导航系统定位误差的发散。
从以上分析可知, 如何提高惯导系统提供的数学地平的精度, 是提升惯性/天文组合导航定位精度的关键。 鉴于此, 本文提出了一种高精度数学地平获取方法, 并在此基础上, 设计了一种基于高精度数学地平的惯性/天文组合导航方案。
1 问题描述
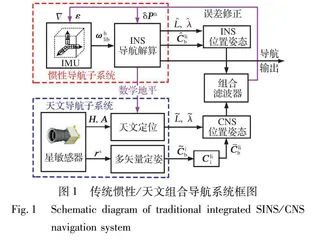
1.1 传统惯性/天文组合导航方法
传统惯性/天文组合导航系统工作原理如图1所示[12]。 天文导航系统利用星敏感器观测恒星, 获得星光矢量信息, 经过定姿解算得到高精度的惯性姿态C~lib, 进而对惯导系统的平台失准角Φli和陀螺常值漂移ε进行估计与校正; 同时, 天文导航系统结合惯导系统提供的数学地平信息C^tb, 利用高度差天文定位方法获得载体的经纬度信息L~和λ~, 进而对惯导系统的位置误差δPli与加速度计零偏Δ进行估计与补偿。
传统惯性/天文组合导航系统状态方程为X·=FX+GW, 通常系统状态变量X定义为[4]
X=[ψx, ψy, ψz, δvx, δvy, δvz, δL, δλ, δh, εx, εy, εz, Δx, Δy, Δz, αx, αy, αz]T(1)
式中: ψx, ψy, ψz为平台失准角; δvx, δvy, δvz为速度误差; δL, δλ, δh为位置误差; εx, εy, εz为陀螺常值漂移; Δx, Δy, Δz为加速度计零偏; αx, αy, αz为星敏感器安装误差; F为系统状态矩阵; G为噪声转移矩阵; W为系统噪声阵。
传统惯性/天文组合导航系统量测方程为Z=HX+V, 通常以惯导系统和天文导航系统输出的姿态矩阵Clib之差作为姿态量测量Z1; 以经纬度L, λ之差为位置量测量Z2; V为量测噪声阵; H为姿态量测矩阵, 其具体形式为
H=H1H2=I3×303×12ClibCbs
02×6I2×202×7(2)
式中: Cbs为星敏感器的安装矩阵。
由于天文定位解算的过程需要利用惯导提供的数学地平信息, 而惯导提供的数学地平必然包含惯导系统的导航误差, 因此, 下面分析惯导误差与天文定位误差之间的关系。
1.2 数学地平精度与天文定位误差的关系模型
天文导航系统利用恒星的天文观测角解算获得载体位置信息。 其中, 天文观测角为表征恒星星光矢量在当地地理坐标系下位置的三个特征角[13], 包括高度角H、 天顶角D和方位角A, 如图2所示。
(1) 高度差与天文定位误差之间的关系模型
根据高度差法天文定位基本原理[14], 恒星高度角H、 方位角A与载体经纬度L, λ之间的关系为
sinH=sinLsinδ+cosLcosδcosLHA
cosAcosH=cosLsinδ-sinLcosδcosLHA (3)
式中: δ为所观测恒星的赤纬; LHA为载体所在的地方时角。
定义恒星高度差为ΔH; 载体经纬度误差为ΔL, Δλ, 则名义高度角H^、 名义经纬度L^, λ^可以表示为
H^=H+ΔH
L^=L+ΔL
λ^=λ+Δλ (4)
将式(4)代入式(3), 对三角函数项进行展开并化简, 可得高度差与经纬度误差之间的关系为
ΔH=ΔLcosA+ΔλcosLsinA(5)
式(5)表明, 天文定位误差ΔL, Δλ与所观测恒星的高度差ΔH有关, 高度差越大, 天文定位误差越大。
(2) 数学地平误差与高度差之间的关系模型
地理系下的星光矢量rt与星敏感器坐标系下的星光矢量rs之间的关系为
rt=C^tbCbsrs(6)
式中: C^tb为惯导系统提供的数学地平; Cbs为星敏感器坐标系相对于本体系的安装矩阵。
惯导提供的数学地平与真实地平之间的关系为
C^tb=[I-(φt×)]Ctb(7)
式中: φt= E N UT为地理系下的平台失准角, 反映了数学地平的精度。
地理系下星光矢量rt与天文观测角H, A的关系为
rt=cos(H+ΔH)sinA
cos(H+ΔH)cosA
sin(H+ΔH)(8)
将式(7)~(8)代入式(6)并化简, 可得天文观测角与地理系下平台失准角之间的关系为
ΔH=-cosAc E+sinAc N(9)
式(9)表明, 所观测恒星的高度差ΔH与地理系东向失准角 E和北向失准角 N的大小有关, 地理系下的失准角越大, 恒星的高度差越大。
(3) 数学地平精度与天文定位误差之间的关系模型
当所观测星数为n(n≥2)时, 根据式(5)可以得到多颗恒星的高度差与天文定位误差之间的矩阵关系, 即
ΔH=ΔH1ΔH2ΔHn=MX=cosAc1sinAc1cosAc2sinAc2
cosAcnsinAcn
ΔLΔλcosL(10)
式中: Ack表示第k颗恒星对应的方位角, k=1, 2, …, n。
根据最小二乘原理, 求解使式(11)的损失函数最小时的X:
J(X)=(MX-ΔH)T(MX-ΔH)(11)
可得X的表达式为
X=(MTM)-1MTΔH(12)
将式(5)和式(9)代入式(12)整理并化简, 可得天文定位误差ΔL, Δλ与地理系平台失准角φt= E N UT之间的关系为
ΔLΔλ=-10001cosL0 E N U(13)
从式(13)可以看出, 天文定位误差ΔL, Δλ受惯导系统在地理系下的东向失准角 E和北向失准角 N的影响。 惯导系统在地理系下的东向与北向失准角越大, 天文定位的误差越大。
1.3 惯导系统误差与数学地平精度的关系模型
弹道导弹的导航系为发射点惯性坐标系(li系, 以下简称发惯系), 其中yli轴沿发射点重力的反方向指向地表外, xli轴与yli轴垂直并指向发射方向, zli轴按照右手定则确定。 导弹发射后发惯系的坐标轴始终指向惯性空间的固定方向, 如图3所示。
根据地理系与发惯系下惯导误差的关系式可得[15]
φt=CtliΦli+δPtθ(14)
式中: Ctli为发惯系到地理系的转换矩阵; Φli为发惯系下的平台失准角; δPtθ为地理系位置误差角。
地理系位置误差角δPtθ与发惯系下的位置误差δPli之间的关系为
δPtθ=MCeiCiliδPli(15)
式中: Cei为地心惯性系到地心地固系的转换矩阵; Cili为发惯系到地心惯性系的转换矩阵; M为与载体位置有关的系数矩阵, 其具体形式为
M=1h+RsinLcosλsinLsinλ-cosL-cosLtanλcosλ0-sinLtanλtanLcosλ0(16)
将式(15)代入式(14), 可得地理系下的失准角φt与惯导系统在发惯系下的平台失准角Φli=ψxψyψzT以及位置误差δPli=δxliδyliδzliT之间的关系为