类脑群体导航的机理与发展
作者: 李卫斌 杨东浩 李战斌 侯彪 焦李成
摘 要:近年来,无人机、无人汽车、无人艇等智能无人系统在军事、工农业生产、物流运输等各个领域起到了重要的作用。由于单个无人系统资源与能力的局限性,无法满足愈加复杂的现实需求,因此,将多个智能无人系统组成集群实现协同工作和群体智能成为一种趋势,其中群体导航定位是群体智能的重要基础。传统的卫星导航无法满足无人集群系统在复杂环境下的导航需求,其自主导航成为亟待解决的问题。类脑群体导航是受动物导航系统与群体协同神经机制和原理的启发而产生的一个有前景的研究领域,旨在实现复杂和未知环境中高效智能导航,可以满足无人集群系统的导航需求。本文综述了类脑群体导航的概念、机制,探讨了实现类脑群体导航的空间神经机理、相关的仿真模型,以及基于群体智能的类脑群体决策相关算法,最后讨论了类脑群体导航的发展方向。
关键词:类脑智能; 群体协同; 自主导航; 群体导航; 类脑导航
中图分类号:TJ760; V249.3
文献标识码: A
文章编号:1673-5048(2023)05-0092-12
DOI: 10.12132/ISSN.1673-5048.2023.0118
0 引 言
在自然界中,为了更好的生存与繁衍生息,一些生物演化出了抱团合作、相互取暖的生存模式,如蚁群可以用群体的力量建造复杂精美的蚁巢; 狼群可以通过合作,以更高的效率围捕猎物; 候鸟可以通过编队提高飞行效率,减少迁徙途中的力量消耗。受此启发,研究人员也开始研究联合统一、协作配合的无人集群系统。无人集群系统是由多个相互联系、协同控制的个体智能无人系统组成的具有统一调配、群体决策能力的智能群体,具有并行感知与计算的能力。相比于个体智能无人系统其携带设备及资源有限的缺点,无人集群系统具有通过协同合作实现资源信息共享、以更小的成本和更高的鲁棒性适应复杂外界环境,执行较为困难任务的能力。
导航是指确定和控制物体或人员在空间中的位置和移动方向,以便实现特定目标的过程,包括信息感知、建图定位及决策等3个步骤,信息感知和建图定位是基础,决策例如路径规划、方向控制等是实现智能化的关键。精确导航是实现无人集群系统的前提之一,这要求有稳定精确的导航系统。现有的导航系统大多是基于卫星导航,可以用较小的成本实现较为精准的导航效果,然而该类导航系统无法适应复杂的外界环境,如卫星拒止环境,或者电磁较为紊乱的复杂环境。在这些环境中,智能无人系统很难从卫星获取稳定且正确的位置信息,到目前虽然已经研究了许多方法来克服这些问题,但是由于效果和成本问题,仍需要新的导航方式以解决这些问题。
类脑智能是通过模仿自然界生物大脑工作机理来进行智能研究的技术。由于生物大脑通过漫长的自然演化,集感知、决策、记忆及学习等能力于一身,通过借鉴大脑的神经机制、组织结构等,可以实现具有优秀适应和学习能力的人工智能系统。因此,通过学习大脑的空间神经结构,获得类似于生物的空间认知能力,借此可以实现机器人的自主导航。随着类脑智能的研究深入,类脑导航为智能无人系统适应复杂多变的环境提供了新的思
路。类脑导航可以借助自身传感器构建实时环境地图并实现自主定位与决策,提高智能无人系统的内在“智力”,实现缺失卫星信号的情况下自主导航。
传统的卫星导航需要一组在轨道上运行的卫星,通过接收来自多个卫星的信号,并计算这些信号的时间差来确定接收设备的位置。接收设备会收集到4颗以上卫星的信号,来计算自身的位置坐标,是现有应用最广泛的导航系统。相较于卫星导航,类脑导航具有以下优势:
航空兵器 2023年第30卷第5期
李卫斌,等: 类脑群体导航的机理与发展
(1) 独立性: 类脑导航系统无需借助外源性设备如地面基站或卫星等,仅借助自身传感设备实现自主导航定位功能,因此可以在地下、隧道或山区等信号遮蔽环境下工作,但在该种环境下卫星导航系统会出现精度下降甚至无法使用的情况。
(2) 实时性: 类脑导航系统通过感知环境并结合自运动信息获取实时的位置信息,相较于卫星导航,具有更快的响应与定位速度。
(3) 高精度: 传统的卫星导航精度一般在几米到十几米之内,而类脑导航通过处理大量的传感器信息并进行数据分析与优化,可以将定位误差缩小至米级之内,具有更高的精度。
(4) 健壮性: 类脑导航具有多模态感知能力,通过耦合不同感知信息获取精准的环境信息与位置信息。即使部分传感器失效,其余也可以正常运作,不会过多影响导航性能。
同时,从昆虫的群体行为到鸟类的迁徙,生物群体展现了出色的路径规划和协作能力。通过借鉴生物群体的行为模式,并模拟生物群体协作机理,可以实现无人集群系统高智能化的合作、协调和配合能力,使集群表现出更高水平的智能和效能。因此结合类脑导航与基于群体智能的类脑群体协作,实现群体层面的类脑导航,将成员之间的信息交换、任务分配、资源共享和行动协调等机制结合在一起,实现高效、鲁棒和智能的协同行动,实现无人集群导航的智能化、自主化,实现更高层次的群体导航效果。
1 类脑群体导航基本概念
1.1 类脑群体导航概要
自然界生物展示了惊人的导航能力,其能在复杂的环境中实现精确的自主导航。通过感知环境、记忆地标和路径、决策和规划行动,高效地完成自主导航任务。类脑导航是一种借鉴生物大脑的工作原理和机制,将其应用于导航系统,不借助外源性信息实现自主导航的能力。
当生物或者无人系统处于陌生环境时,需要解答2个基本问题,“身处什么地方?”和“身处于什么环境?”。为了求得两个问题的解,需要达成两个目标,一个是自定位,即不借助外源性信息的情况下,依靠自身传感器实现自身的相对定位; 另一个是构建实时环境地图,即在行进中使用传感器的信息构建地图。自定位需要有实时环境地图以确定位置,构建实时环境地图也需要有实时定位信息才可以将传感器信息融入进地图,两者互为条件。因此,这2个问题需要同时进行解答,这本质是解决同步建图与定位(Simultaneous Localization and Mapping,SLAM)问题。在此之后,还需要解决“去哪个地方?”的问题,这代表的是导航决策的能力。如何更好地解决这3个问题,是提高自主导航能力的关键。
类脑导航技术通过将生物导航机制与计算机科学相结合,通过研究生物导航机制,从中获得启发,将生物大脑中的神经网络结构与信息编码机理转化为计算机算法模型或硬件结构,融入导航系统中,提高自主导航的健壮性、自主性与自适应性。
由于自然界中许多生物具有通过群体行为实现复杂的导航和协同行动的能力,如鸟群、鱼群和蚁群等具有高度协调和合作的行为,通过研究生物群体行为,模仿生物协同机制,结合类脑导航方法,可以实现群体层面的高级导航决策能力。因此,类脑群体导航是通过借鉴生物大脑的神经结构与网格细胞、位置细胞等空间认知细胞,基于多模态传感器融合信息,实现类似于自然界生物的空间认知与自主导航能力; 并模拟自然界生物群体协同行为模式,具备群体定位与整体环境地图构建、多智能体协同能力的高性能群体导航算法。将其用于无人集群系统的导航与协作中,可以实现具备高鲁棒性与自主性的群体导航效果。
1.2 类脑导航与类脑群体导航的关系
类脑导航借鉴了大脑中与空间认知相关的结构和神经机制,如海马体、头朝向细胞、网格细胞等,研究个体动物在空间中的导航能力和行为机制。类脑导航关注的是个体动物在环境中的定位、路径规划和空间记忆等问题。通过理解和模拟大脑的导航机制,为人工智能领域中的导航算法提供启示和改进。
类脑群体导航将重点放在群体中多个个体的协作和合作行为上,主要研究群体中个体之间的信息交流、合作决策和群体行为的组织规律。类脑群体导航不仅关注个体的导航能力,更注重如何通过群体智能来实现更高效、灵活和智能的导航和决策。因此,类脑导航是研究个体动物的导航能力和神经机制,而类脑群体导航则是在类脑导航的基础上,进一步研究群体协作和合作行为,实现群体层面导航的优化和智能化。
1.3 类脑群体导航框架
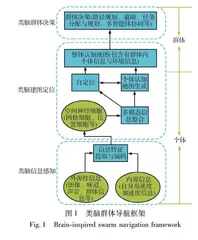
类脑群体导航算法可以分为个体与群体两个层次,以及3个步骤: 类脑信息感知、类脑建图定位与类脑群体决策。类脑信息感知模块中,利用多种感知模态,如视觉、听觉、触觉等,以获取充足的环境信息,模仿生物神经系统中的并行处理机制,从原始的感知数据中提取出更高级的语义和特征信息,从而实现更高效的感知和响应; 类脑建图定位模块借鉴生物大脑空间认知神经结构与相关空间神经细胞,对自身的位置进行估计和定位以及同步个体环境地图更新,并将个体地图集成至群体地图,实现具有环境信息与群体信息的群体认知地图; 类脑群体决策模块通过模仿生物群体的决策机制和协同行为,类脑群体决策使得多个个体或机器人能够在群体中相互协作、相互影响,并实现集体智慧的发挥,从而提高整个群体的决策能力和适应性,实现群体智能和协作效能的最大化。类脑群体导航的整体架构如图1所示。
2 哺乳动物空间认知机理
动物的空间认知能力对于帮助动物建立环境地图和空间记忆以寻找生存资源或躲避敌害具有重要的意义,在动物的生存、繁衍和适应环境方面发挥着关键的作用。哺乳动物作为目前智力最高的动物类别,对于研究人员研究大脑空间认知机理具有重要作用。
对于个体而言,哺乳动物的海马体与内嗅皮层被认为是大脑中产生动物空间认知能力的重要区域,其中的空间神经细胞,如位置细胞、网格细胞、头朝向细胞、边界细胞、速度细胞等是动物可以自主寻路的内在保证。通过不同空间神经细胞的相互交互,并对外部信息与自我运动信息的编码,在大脑中构建认知地图,实现个体的空间认知与导航。
在群体层面,现已被证明海马体内也存在具有群体空间认知能力的群体位置细胞[1],能够对群体内其余个体的行为与位置进行编码,这是实现群体智能与自组织行为的生物基础。
本章重点介绍位置细胞、头朝向细胞、网格细胞、群体位置细胞的生物机理及交互模式。
2.1 位置细胞
1971年,O’Keefe等在自由活动且清醒大鼠的海马体中具有位置特异性放电的特殊锥体型细胞[2]。使用大鼠进行实验时,研究人员发现当大鼠经过某个特殊地方时,对应的位置细胞会开始放电,位置细胞放电所对应的位置被称为位置细胞的放电野(又名位置野),如图2(a)所示,黑色曲线为大鼠的运动曲线,红色区域为大鼠位置细胞放电时大鼠所处的位置。图2(b)为位置细胞的放电强度图,红色代表放电最强烈,蓝色代表放电强度最低。
位置细胞要对外界环境信息进行编码,需要接入多种的信息输入,如外源性信息(视觉、听觉、嗅觉等感受信息),内源性信息(大脑前庭的感觉信息、身体的自运动线索),还要接受来自海马体内部的循环信息。当动物进入陌生环境时,位置细胞会使用外源性信息进行编码,以生成新的稳定的放电野,该放电野会持续很长时间且在黑暗中也可以稳定存在[3]; 当动物离开该环境很长时间后,再次返回时,位置细胞对应该环境的放电野依旧稳定的存在。位置细胞是动物空间记忆,自主寻路的神经基础,且同一位置细胞可以参与不同环境的表示[4]; 当动物进入全新的环境时,位置细胞的放电野会发生改变,重构为对应的放电野[5]。几十个位置细胞的集体放电足以形成动物当前位置的准确表示[6]。近年来,三维位置细胞也在人类的相应脑区中发现,该类细胞可以根据动物的运动模式灵活的在二维与三维之间切换[7]。
2.2 头朝向细胞
1984年,Rank在记录大鼠海马区下托的神经元时,偶然发现了前下托的许多细胞放电仅与大鼠的头部水平方向有关,而与其位置和正在进行的行为无关。如当老鼠把头指向东北方向时,一个细胞可能会放电; 当老鼠把头向西时,另一个细胞就会放电。这些细胞被称为头朝向细胞[8]。
头朝向细胞存在于整个边缘系统中,包括前下托、丘脑前背侧核、背纹状体等区域。其放电方向受头部朝向的影响。每个细胞的最大放电速率只发生在一个头部方向上,在首选方向两侧的头部方向上的速率随与首选方向的角偏差呈线性下降[9]。因此,每个头朝向细胞都有独自的最佳放电方向,当头部向某方向转动时,离该方向的夹角越小,对应的头朝向细胞的放电就会越强烈。生物在运动时,头朝向细胞不断被激活,这些头朝向细胞的放电信息整合到一起就会形成一个连续的方向信号。头朝向细胞的方向编码会随着某个视觉标志的旋转而改变,这代表着头朝向细胞对于方向的认知来自于外界信息。根据研究,三维头朝向细胞可以对动物的俯仰、偏航、滚转进行编码,能够表征环境的各个方向。头朝向细胞是生物“导航系统”的重要组成。