基于视觉的无人机自主着陆研究综述
作者: 钟春来 杨洋 曹立佳 王喆
摘 要:无人机被广泛应用于抢险救灾,自主着陆是无人机应用中的关键技术之一。由于精度和干扰的影响,传统的导航技术如GPS和INS往往不能满足着陆阶段的导航要求。基于视觉的自主着陆系统具有自主性强、成本低、功耗低、抗干扰能力强等优点,适合应用于无人机自主着陆阶段的导航。本文总结了当前基于视觉的无人机自主着陆领域的研究成果,按相机安装位置和着陆平台类型进行梳理,对其中的关键技术进行了比较和分析,并指出了未来的发展趋势。
关键词:无人机; 自主着陆; 计算机视觉; 标识检测; 导航
中图分类号:TJ760; V279
文献标识码: A
文章编号:1673-5048(2023)05-0104-11
DOI: 10.12132/ISSN.1673-5048.2023.0045
0 引 言
无人机(Unmanned Aerial Vehicle,UAV)正在改变多种行动的执行方式。无人机技术的发展为数据和图像采集[1]、特定目标的定位和跟踪[2]、地图构建[3]、通信中继[4]、管道勘测[5]、军事行动[6]、边境巡逻、持续广域监视[7]、搜索救援[8]以及交通监测等任务带来了更高的效率。然而无人机的自主着陆是事故发生率最高的阶段,精确稳定的测量出无人机的实时位置和姿态是准确引导着陆的关键点。常规的飞行参数估计方法包括: 全球定位系统(Global Positioning System,GPS)、惯性导航系统(Inertial Navigation System,INS)。GPS通过卫星进行定位,精度较高且误差不随时间累积,但GPS只能在开阔地形中获得很高的精度,而在森林、峡谷、城市高楼间通常无法获得正确位置信息,其在军事上是完全不可取的。INS通常由陀螺仪和加速度计组成,通过对角加速度和加速度进行积分得到载体位姿参数,具有自主性,不依赖外界信息,但其误差随时间累积,不能用于长时间导航。为有效避免传统定位方法的缺陷,研究人员对视觉着陆技术进行了更深入的研究,这项技术的发展将成为无人机着陆究领域中新的里程碑。
基于视觉的导航方法由于能够在没有GPS的环境下正常工作且不漂移,受到广泛关注。视觉导航利用摄像头等视觉传感器获得图像,通过图像识别、深度学习等相关技术计算载体导航参数,具有成本低、信息量大、高自主和完全无源性等优点。首先,基于视觉的着陆系统可以提供无人机与着陆场地的相对位姿参数; 其次,视觉传感器是主动传感器,一定程度上保证了无人机在对抗环境中的安全; 最后,视觉传感器的体积小且重量轻,不会对无人机造成载荷负担。
近年来,国内外研究者对无人机导航技术[9-10]、无人机目标检测技术[11]、无人机安全着陆区探测技术[12]、无人机自主着舰[13-14]、机舰协同技术[15]等进行了研究与总结,但对利用视觉传感器的自主着陆系统介绍较少。为进一步促进无人机视觉自主着陆技术的发展,本文对国内外使用视觉传感器进行无人机自主着陆的研究现状进行了集中整理分析。无人机按机翼结构可分为固定翼、旋翼(直升机和多旋翼)、扑翼等,不同的机翼构造导致无人机的起降方式各不相同。旋翼无人机可空中悬停,可垂直起降。与旋翼无人机相比,固定翼无人机无法在
空中悬停,需要跑道滑行起降。本文主要总结了固定翼和旋翼无人机的视觉自主着陆方法, 虽然二者降落方式略有不同,但二者视觉降落的技术可以相互借鉴。根据相机安装位置将视觉系统分为机载系统和非机载系统,
并根据着陆目的地类型将其分为静态、动态目标场地。其中,静态场景包括两类: 合作标识物和自然环境特征; 动态场景分为两类: 车载平台和船舰平台。
1 非机载视觉系统
非机载相机系统通常依靠固定在地面上的单目或多目视觉系统[16]。该系统从3D-2D对应关系中估计无人机的姿态,这意味着必须知道图像上突出特征的3D布局。非机载系统配置支持使用高质量图像系统且更容易获得足够的计算能力,这使得部署更复杂的方法成为可能,且不必担心无人机因视觉系统造成的能源消耗和载荷负担。
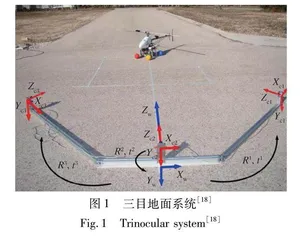
非机载相机系统早期的研究是在2006年,Wang等[17]提出一种使用步进电机控制的网络摄像头识别贴有标记的微型飞机上的系统。然而,此地面系统的视场较窄,距离相机1 m时识别区域只有140 cm×140 cm。为了扩大视场范围,研究人员提出使用多个相机的方法。Martinez等[18]引入了一种三目地面系统,如图1所示。该系统由三台固定在铝制平台上的相机组成,用于提取飞机的关键特征,以获得鲁棒性好的3D位置估计。文献[19]在2010年提出一种地面立体视觉系统,该系统用于估计四旋翼飞行器的三维位置,并实现自主悬停和户外自主降落。系统采用连续自适应均值漂移的检测算法,可以检测到6 m高度内的无人机。文献[20]建立了一个地面立体视觉系统,如图2所示。系统由两个独立模块组成,对称布置在无人机着陆点附近的跑道两侧,每个独立模块由云台搭配摄像头组成并独立连接到计算机,两个相机捕获的图像序列同时发送到数据处理计算机,检测算法从捕获的序列图像中提取无人机的图像位置并利用标定数据和云台倾斜角度还原出无人机的空间位置。但此算法中无人机被简化为一个单点,无人机位置由三角测量法解算,丢失了无人机的姿态信息。由于相机具有固定的视场,导致大多数都受到工作距离的限
制,为了扩大工作距离,Guan等[21]使用多个不同焦距的相机以覆盖飞机的所有降落轨迹, 可以在不增加飞机载荷的情况下实现飞机的精确着陆。此外,Liu等[22]提出一
个用于飞机相对姿态测量的机外视觉系统。该系统结合了一个变焦成像单元和一个平移/倾斜伺服单元,能够在大距离范围内测量飞机姿态。Li等[23]开发了一个级联深度学习模型,用于无人机自主着陆的图像检测和精度提升。实际飞行实验结果表明该系统能够在飞机下降和滑行阶段引导飞机在视场内移动,完成自主着陆。
由于光学相机只能在晴朗天气下进行工作,当天气恶劣和夜晚时以上的非机载相机系统无法正常工作。为了扩展工作时间,达到能够全天候使用,部分系统采用红外相机作为视觉传感器。Fu等[24]设计了一个单眼红外视觉系统,通过安装在地面上的红外相机观察四旋翼飞机上的4个红外发光二极管(Light Emitting Diode,LED)标记来估计无人机姿态。2020年,该团队将其扩展为一个多相机系统[25]并提出一种融合机外多个相机信息的基于扩展卡尔曼滤波(Extended Kalman Filter,EKF)的姿态估计算法。此外,Kong等[26]提出一种基于红外相机的立体视觉系统,该系统由两个红外相机和云台(Pan-Tilt Unit,PTU)组成,其结构如图3所示。为了扩大系统的工作范围,该团队于2017年将红外相机和其他传感器
安装在两个独立PTU上并将其分别放在跑道两侧,构成一个地面立体视觉系统[27]。该系统根据图像信息和来自PTU的旋转角度计算目标。每个视觉单元独立工作,并将图像处理和PTU状态的结果传送到导航计算机,计算无人机的相对位置。
非机载相机系统除了应用在地面,还被广泛应用于海事无人机舰船着陆。海事无人机主要通过监测和侦查的方式来维护国家海洋安全以及防治海洋污染,为海洋防灾减灾提供优质的服务,进而为区域海洋经济发展保驾护航。相对于海巡船和有人驾驶飞机,无人机具有体积小、重量轻、携带方便等优点,尤其是对起飞环境要求较低,需要的起飞跑道较短甚至不需要跑道,可以在岸基或海巡船上进行起降。2015年,Santos等[28]设计了一种安装在船舶甲板上用于无人机降落的视觉系统,该系统使用粒子滤波器(Particle Filter,PF)和无迹卡尔曼滤波器(Unscented Kalman Filter,UKF)的组合框架进行无人机位姿估计,实验结果表明位置和角度估计的精度符合自主着陆系统的要求。两年后,该团队对该系统进行改进[29],将粒子滤波框架应用于基于三维模型的姿态估计问题,试图从现有的重采样方案中检索尽可能多的信息。2018年,该团队对系统进行再次升级[30],使用捕获的图像作为输入,用粒子滤波结构估计无人机轨迹并分别采用UKF滤波器和UBiF(Unscented Bingham Filter)滤波器对无人机平移运动和旋转运动进行滤波。为保证实验安全性,创建了一个合成视频着陆序列生成地面真实数据,定量分析实验结果,得到的跟踪误差符合自主着陆的要求。
2019年,Santos等[31]又开发了一种基于3D模型的无人机着陆地面跟踪框架,并在无人机跟踪中使用了方向统计分布。由于移动平台处于海上,且受区域气象条件(如风浪)的影响,视觉系统面临诸多挑战。为了克服这个问题,该团队使用了基于网络的保持系统,以确保UAV的安全着陆。基于三维模型的算法是很好的无人机姿态估计方法,但需要较大的处理能力。这种处理能力在地面系统中很容易获得,因为其与无人机相比不存在任何载荷限制。2023年,该团队在已有系统基础上加入了基于树的相似性度量方法[32],提高了算法速度。2022年,Liu等[22]提出一种基于模型的姿态跟踪算法,需要飞机的计算机辅助设计(Computer Aided Design,CAD)模型来测量飞机相对于参考平台的相对姿态并采用二维视觉跟踪算法和目标检测算法对视觉系统进行控制。所提出的姿态跟踪算法在公开数据集上取得了具有竞争力的结果。通过实际飞行试验对整个系统进行验证,结果表明,该系统可实时运行1 920×1 080@40 Hz视频,精度优于0.5°。
现有的非机载视觉系统大多应用于固定翼无人机,因为固定翼无人机降落时速度快,滑行距离远,一般的非机载视觉系统将摄像机固定在固定跑道末端,能够监控飞机滑行降落的整个过程,也可部署多个系统提高检测距离和范围。
2 机载视觉系统
机载视觉系统通常由单个或多个校准的前视摄像头组成。在飞机着陆过程中,相机拍摄图像并利用计算机视觉算法来提取图像上的突出特征, 如跑道边缘、灯光或辅助标识物等,然后利用提取的图像特征解算飞机的姿态问题,或与INS数据相结合,共同完成飞机姿态的计算和控制。根据机载相机系统的着陆平台是否为运动的可分为静态目标场地和动态目标场地。
2.1 静态目标场地
无人机自主着陆研究领域,在静态目标场地着陆如标准跑道、停机坪等是研究无人机自主着陆的基础。无人机在静态场景下的自主着陆可分为基于合作标识的自主着陆和基于自然环境特征的自主着陆。基于自然环境特征的着陆指无人机可以在没合作标识物的情况下识别环境特征进行着陆。
2.1.1 基于合作标识物的着陆
基于合作标识物的无人机自主着陆技术的关键是准确检测、识别合作标识并精确提取其特征,利用提取的特征来计算飞机当前的飞行姿态。合作标识是根据几何图案或某些几何规律的原理设计的一种识别标记。设计准确高效的标识和相应的检测算法是提高无人机自主着陆能力的重要途径。目前主流的识别标识有“H”和“T”,以及圆形、矩形、组合标识等,如图4所示。组合标识通常是指由标准几何图形排列组合而成的图形,如承载信息的二维码、条形码等,密歇根大学基于二维码组合图形合作靶标开发了开源无人机自主着陆视觉系统April Tag[33-34]。
基于合作标识物的自主着陆算法已经比较成熟,研究人员对部分成果进行了总结[38],但不够完善,现将近十年国内外各研究机构已有的标识类型、检测方法及实验结果进行总结,如表1所示。
除了以上这些需要在平面上放置辅助标识物的着陆方法外,还有一些研究团队利用辅助灯光引导飞机着陆。
Chatterji等[68]和Oszust等[69]从捕获的图像中的路径指示灯和进场灯来解算飞机的姿势。此外,Gui等[70]的一项新研究开发了一种基于固定在跑道两侧的红外指示灯计算飞机姿态的方法。在跑道附近安装4个红外灯,通过机载单目相机图像提取灯的准确位置,可以用来计算飞机的姿态,进行着陆辅助。