基于相关滤波的舰船目标抗干扰跟踪算法
作者: 邱千钧 周鹏耀 高欣 张芳 吕梅柏
引用格式: 邱千钧,周鹏耀,高欣, 等 . 基于相关滤波的舰船目标抗干扰跟踪算法[ J]. 航空兵器,2023, 30( 6): 123-129.
Qiu Qianjun, Zhou Pengyao, Gao Xin, et al. Anti.Jamming Tracking Algorithm for Ship Target Based on Correlation Filtering [ J]. Aero Weaponry,2023, 30( 6): 123-129.( in Chinese)
摘 要: 针对舰船类目标跟踪中面临的形态变化和尺度缩放导致的跟踪漂移或丢失问题,本文设计了一种基于多特征融合和阈值选取的抗形态变化和尺度变换干扰目标跟踪算法。在抗形态变化模块中,设计了一种多特征加权融合方法。通过将方向梯度直方图、局部二值模式、颜色矩按颜色矩特征识别贡献率进行自适应加权融合,加强了舰船类目标重要部位特征提取能力,提高了算法跟踪过程的鲁棒性;在抗尺度变换干扰模块中,设计了一种多分辨率目标框共同搜索、最大响应峰确定目标位置的方法,解决了舰船类目标尺度缩放导致的跟踪框鲁棒性低的问题。实验结果表明,本文算法具有更出色的跟踪性能,其在OTB数据集上的精确度为93.6%,成功率达到70.1%,优于其他相关算法。
关键词: 特征融合;阈值选取;目标跟踪;相关滤波;尺度缩放;方向梯度直方图;抗干扰
中图分类号: TJ760
文献标识码: A
文章编号: 1673-5048(2023)06-0123-07
DOI: 10.12132/ISSN.1673-5048.2023.0110
0 引 言
海上舰船目标跟踪是制导导弹实现准确打击的关键之一,在跟踪算法中,目标特征选取及特征提取方法很大程度上决定了跟踪性能的好坏。舰船类目标制导系统特征的提取难点主要在于尺度缩放和特征丢失问题。这些问题的存在使得跟踪任务可能会受到影响,造成目标丢失、跟踪非选中目标等结果。
随着计算机技术广泛应用到生产与生活中,计算机数字处理技术在图像处理中的应用发展迅速[1]。计算机视觉是图像处理中一个重要的研究方向,其主要任务是利用计算机代替人眼对场景进行感知[2],通过对摄取到的图像信息进行提取,实现目标跟踪功能。
目标跟踪[3]作用机理是通过给定视频流中的第一帧或后续某一帧目标的坐标和长宽后,在后续帧中对目标进行识别,持续稳定跟踪目标的位置状态。基于视觉目标跟踪主要分为基于可见光目标跟踪和基于红外目标跟踪[4]。由于可见光图像容易获取并且拥有较高的分辨率和较为丰富的纹理细节,因此本文目标跟踪算法基于可见光图像。
目标跟踪中基于相关滤波的跟踪算法应用较为广泛,最早将相关性应用到目标跟踪中的算法是MOSSE(Minimum Output Sum of Squared Error)[5],而之后衍生出的KCF(Kernelized Correlation Filters)算法[6]应用最广泛。
基于相关滤波开展的KCF算法使用目标的HOG(Histogram of Oriented Gradient)特征,但这种特征对于目标尺度缩放、目标形态变化等带来的特征丢失、局部特征不足、抗尺度变化能力不够等问题不能很好的解决。因此,本文针对以上问题,开展基于HOG,LBP(Local binary patterns),CN(Color Names)三种特征柔性融合技术对原有KCF算法特征丢失及局部特征不足进行改进,开展多分辨率阈值选取算法研究,对KCF算法抗尺度缩放干扰能力不足进行优化。
实验研究表明,本文提出的基于特征柔性融合和多分辨阈值选取的改进KCF算法,有效解决了舰船类目标跟踪过程中特征模糊及丢失导致的形态变化和目标尺度缩放问题。
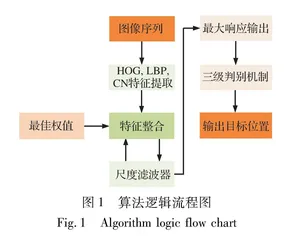
本文研究的算法逻辑流程如图1所示。
收稿日期: 2023-06-06
基金项目: 基础加强计划重点基础研究项目(2020-JCJQ-ZD-076-00);哲学社会科学基金项目(21AGL030)
作者简介: 邱千钧(1990-),男,北京人,硕士。
*通信作者: 周鹏耀(1998-),男,宁夏银川人,博士。
1 HOG,LBP,CN特征融合
可见光图像,一般为RGB三通道[7],其本质是一个二维矩阵,RGB图像是利用红色(Red)、绿色(Green)、蓝色(Blue)三个颜色进行加权堆叠得到二维矩阵中的一个像素。
航空兵器 2023年第30卷第6期
邱千钧,等: 基于相关滤波的舰船目标抗干扰跟踪算法
特征提取是可见光目标跟踪制导系统的一个重要组成部分,图像特征提取利用计算机提取图像的信息,判别图像的像素点是否属于图像的一个特征。特征提取把图像上的像素点分成不同子集[8],子集一般分为孤立的点、连续曲线或者连续区域。
图像特征种类很多,因其应用于不同任务有很多种分类方法,本文主要介绍三种特征,分别为HOG特征、CN特征、LBP特征。利用这三种特征进行特征像素级融合,提高目标跟踪特征提取能力,解决特征模糊问题。
1.1 HOG特征提取
HOG特征是一种特性描述子,即计算每个像素的梯度得到HOG特征[9]。目标的局部形状可以被梯度很好地描述,因为梯度主要存在于局部目标中的边缘区域。提取HOG特征的步骤如图2所示。
(1) 首先是输入图片,之后对图像做归一化处理,由于采集到的图像有时会过亮或过暗,利用Gamma校正可以解决此问题[10],其原理如下:
I0(x, y)=I(x, y)γ (1)
式中: I(x, y)表示像素点的灰度值;I0(x, y)表示经过Gamma校正后的灰度值;γ表示矫正系数。可以看出,Gamma校正本质是对图像灰度值做非线性操作,使输出图像灰度值与输入图像灰度值呈指数关系,当γ>1时,图像中灰度较高的区域对比度增强,图像变暗;当γ<1时,图像中灰度较低的区域对比度增强,图像变亮;当γ=1时,不改变图像的灰度。
(2) 图像归一化后,对图像中每个像素点计算梯度;
(3) 将图片分成若干个8×8的单元,那么一个单元里会包含8×8×2个值,即每个像素点包含两个信息,梯度幅值和梯度方向,将这128个值统计为梯度直方图,此时特征从128维降到9维。把0°~180°分成9个间距相等的直方图,统计各个像素点从属于哪个直方图;
(4) 得到每一个单元的梯度直方图后,每4个单元为一个子块,即2×2个单元组成一个子块,每个单元为1×9维,4个单元则为1×36维,再对子块进行归一化;
(5) 将子块框在图像上滑动遍历,可以得到若干个归一化后的1×36维子块向量,将这些向量整合拼接,便可得到HOG特征向量。
1.2 LBP特征提取
原始LBP特征提取时,定义以当前像素为中心,取大小为3×3的邻域,把中心点像素灰度值作为阈值,和相邻的8个像素的灰度值做比较,如图3所示。
对原图中某一像素点及其邻域灰度求解得到图3(b),以中心点周围像素的灰度值大于中心点时记为1,否则记为0作为判断标准,对图3(b)进行阈值判断得到图3(c)。将图3(c)中这8个数按顺时针组成一个8位二进制数,这个数就是中心像素的LBP值。
原始LBP特征值计算公式为
LBP(xc, yc)=∑N-1n=02nsgn(in-ic)(2)
式中: (xc, yc)为中心像素的坐标;n为3×3邻域中第n个像素;N为采样个数;i为邻域像素灰度值;ic为中心像素灰度值;sgn(x)为符号函数。
1.3 CN特征提取
颜色特征作为一种全局特征,描述了图像或者图像区域对应景物的表面特征。由于颜色对图像或者图像区域的方向、大小等变化不敏感,造成目标定位准确率低,单独使用CN特征会造成许多不必要的图像也被检索出来。但由于CN特征不受图像旋转和尺度变化的影响,舰船类目标CN特征相对于背景较为明显,所以采用CN特征对舰船类目标进行特征增强,缩小背景噪声干扰。
颜色矩作为一种常用的CN特征提取方法,采用颜色的一阶矩、二阶矩足以表达图像的颜色分布。相比于其他方法,该方法无需对特征进行向量化,一定程度上减少算法的参数,提高算法实时性:
μi = 1N∑Nj = 1Pi, j(3)
σi=1N∑Nj=1(Pi, j-μi)212(4)
1.4 特征加权融合
考虑到舰船类目标由于目标形态变化等问题,原有KCF使用的HOG特征无法解决上述问题。因此,提出了一种基于HOG特征,对LBP和CN特征加权的特征提取方法。该方法将舰船类目标图像进行均匀分块,根据不同块对于LBP和CN特征识别贡献率添加不同权重,加强舰船类目标重要部位对识别效果的影响。该方法实现步骤如下:
(1) 使用m×m卷积将图像分成m块并提取HOG,LBP,CN特征。整幅图像的特征向量为
H=(h1, h2, h3, h4, …, hm)(5)
L=(l1, l2, l3, l4, …, lm)(6)
式中: hi(1≤i≤m)表示第i子块的HOG特征向量;li(1≤i≤m)表示第i子块的LBP特征向量。
(2) 计算每个分块的加权系数。由于舰船颜色与背景区分较为明显,子块颜色标准差能够较为准确反映该子块内舰船颜色所占整个子块的比例。因此,比较子块标准差与舰船类目标颜色阈值的大小,并统计符合阈值的子块,若子块标准差越高,赋予子块的权重就越大。对划分为m块的每个子块提取到的颜色特征,通过舰船类目标颜色阈值选取每个子块合适的权重。
C=(c1, c2, c3, c4, …, cm)(7)
wi=(p21+p22+p23+…+p2j)/j(8)
ηi=wi∑mi=1wi(9)
式中: ci(1≤i≤m)表示第i子块的CN特征向量;wi(1≤i≤m)表示每个子块像素颜色炬的标准差;pj1≤j≤Nm表示子块每个像素的颜色矩;ηi表示每个子块权重。
(3) 将不同子块的权重系数赋予相应子块的HOG特征向量和LBP向量,得到加权后的HOG-LBP特征。
经实验测试,本方法提出的HOG,LBP,CN融合算法对目标形态变化的问题有很好的改善效果,解决了原有HOG特征在上述情况下的特征模糊及丢失问题。
2 KCF算法原理
2.1 岭回归分类器
KCF的基本模型是岭回归分类器。这个分类器和目标的相似值为一个理想值,也就是目标的中心为1,其周围逐渐降低,直至为0[11]。设用于训练的样本集为(xi, yi),可以得到线性回归函数f(xi):
f(xi)=ωTxi(10)
式中: ω为列向量,表示权重系数,也是待求的项,可通过最小二乘法求解。
minω∑i(f(xi)-yi)2+λω2(11)
式中: λ为正则化参数,以防止过拟合。将式(11)写为矩阵形式,即