基于振动传感器的某型储运发箱运输行为姿态检测方法
作者: 张伟 邓士杰 于贵波
关键词: 振动传感器;储运发箱;行为识别;深度学习;分类器
中图分类号:TP29;TP393 文献标识码:A
文章编号:1009-3044(2024)21-0114-05
0 引言
储运发箱作为弹药的载体,是军事物流中一个关键组成部分,确保了弹药的可靠性、安全性和快速反应能力[1]。它与一般运输的物品不同,弹药虽然有引信控制其触发,但仍有可能因运输途中受到一定程度的外力而发生损坏,使其无法使用丧失作战效能,严重者甚至发生弹体内部材料泄漏及发生自燃、爆炸等危险事故[2],因此需要对储运发箱在运输途中的状态严密监控。通过获得的储运发箱行为姿态信息,我们可以实时地了解其所处的状态,及时处理安全隐患,避免更大的危害发生,同时记录的数据也可以为事故发生后的溯源提供一定的事实依据。
目前对储运发箱运输过程中行为姿态的研究较少,但有少数研究人员对物流领域中货物的行为姿态检测有了一定的应用成果。王绍丹等人[3]针对危险品货物在运输途中缺少监控的问题,提出了一种基于加速度传感器的行为姿态检测方法。该方法利用传感器实时获取货物三轴加速度和两轴姿态角数据,通过特征定义及时间窗口完成对动作时间的锁定,最后使用决策树基于自定义的规则完成对危险品货物状态的识别。但这种方法过分依赖管理者的主观经验,特征的定义主要依靠各行为间人为设置的阈值来划定,而阈值的选择则和货物的形状、重量和体积密切相关。孙玉砚等人[4]在研究智能物流系统时,将无线传感器网络WSN和地理信息系统 GIS技术应用至货物的物流追踪。该方法使用无线传感器网络获取货物实时三轴加速度信息,然后使用基于决策树的多特征识别算法完成对货物行为的识别。但该方法数据传输主要依靠GSM网络,在一些信号较差地域会造成较大的网络延迟,影响识别效率,同时对于不同的货物需要制定不同的行为规则,过分依赖人的主观经验。
传统机器学习算法虽然能够完成对物体行为姿态的识别,但往往存在行为特征定义阈值难确定,识别精度不高的问题[5]。基于此现象,深度学习可以很好地解决这一问题。在行为识别领域中,深度学习广受研究人员的追捧,它可以自学习数据中存在的关联信息,挖掘数据背后存在的高级特征,并且不需要任何特征的定义与设置,避免了因人为经验误差导致的错误[6],给科研工作带来了极大的便利,也是未来研究的主流方向。在当前的研究背景下,人体的行为姿态识别结合深度学习已有了较为成熟的研究,我们可以予以借鉴。Ismail等人[7]提出了一种自优化的卷积神经网络(CNN) 用于人体行为识别,它使用遗传算法寻找最佳的CNN架构来提高识别的精度。通过在多个公共数据集上的实验结果表明,该网络可以有效地识别人类活动。Jameer 等人[8]针对人类活动识别的问题,使用了深度卷积神经网络和长短期记忆(DCNNLSTM)相结合的模型用于人类活动分类,并在3个公共数据集上取得了高于99% 的准确率。Lalwani 等人[9]在研究可穿戴设备人类行为识别上,采用了融合双向长短期记忆(BiLSTM) 、卷积神经网络(CNN) 和双向门控循环单元(BiGRU) 的模型用于分类。该模型可以捕获广泛的时间局部连接,有效地解决了数据的长期依赖的问题,并在多个公共数据集的验证下取得了准确的识别效果。
相较于人体行为的复杂性,储运发箱的行为姿态特征独立性更加明显,形态样式较为单一,更容易实现对其行为进行准确的识别与分类。考虑到储运发箱在运输过程中不同状态下的三轴振动速度、位移以及频率都不同,采用振动传感器配合深度学习模型应当能够实现其行为姿态的分类。因此,本文提出了一种基于振动传感器的某型储运发箱运输行为姿态检测方法,该方法首先通过附着在储运发箱表面的振动传感器采集原始数据,然后通过滑动窗口技术分块截取时间片段,并对各时间片段进行特征提取,最后使用深度学习模型实现行为姿态的分类。
1 行为姿态检测
1.1 储运发箱行为姿态的定义与分类
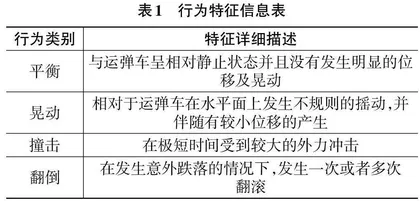
综合储运发箱在运输过程中可能发生的危险行为,将其主要归纳为4类行为特征,具体表述如表1:
考虑到储运发箱运输过程中信息的时序性,某一时间片段可能包含一个甚至多个行为,例如在发生翻倒的情况下,往往是由撞击导致的。同时,物体从晃动状态恢复至平衡状态的过程中,也伴有两种行为。针对此现象,我们依照行为的发生递进关系设置优先级,依次按照平衡、晃动、撞击、翻倒的顺序进行排序,当一时间片段同时包含撞击及翻倒行为时,优先判断为翻倒。
1.2 滑动窗口技术
滑动窗口技术是一种在数据流、信号处理、图像处理等领域常用的算法技术。它通过在数据序列上维护一个固定大小或者可变大小的窗口,来对数据进行局部处理和分析。在处理时,窗口按照一定的步长在数据上滑动,每次滑动都进行相应的计算或者分析[10] 。
储运发箱的行为姿态是一个过程量,从某一时刻通过振动数据进行判断容易产生较大的误差,因此我们使用滑动窗口技术截取时间片段。为了保证在模拟试验中能够获得完整行为的时间片段,通过大量实验得出,选择时序连续且窗口叠加率为50%的30帧作为时间片段的长度可以满足要求,并且有着较好的时间分辨率。
1.3 特征提取与处理
时序数据被分割为一个个小的时间片段后,为了增强模型的分类能力,需要对其进行特征提取。针对三轴振动数据,本研究将在时域、频域上共计提取135 维特征。时域特征上主要提取最大值、最小值、平均值、峰值、峰峰值、标准差、偏度、峭度、峰值因子等特征,频域特征主要是将数据信号通过傅里叶变换提取频谱能量、功率谱密度、频域熵等[11] 。具体信息如表2。
1.4 基于BiLSTM 的深度学习模型
循环神经网络(Recurrent Neural Network, RNN) 不同于传统的神经网络,它擅长于处理时序数据,例如时间序列分析、自然语言处理、音频处理等[12] 。循环神经网络的核心特点是其内部状态(记忆)能够随时间传递,这使得它们能够捕捉到时序数据中的时间动态特征。循环神经网络的基本结构包括一个循环单元,它能够接收当前输入和前一时间步的隐藏状态,并生成当前时间步的输出和新的隐藏状态。但由于其结构的特殊性,RNN在处理拥有较长时间片段的数据时,会出现梯度消失或者爆炸的现象,不能满足需要长期依赖的时间特点。Hochreiter等人[13] 为了解决这一问题,提出了长短期记忆神经网络(Long Short-Term Memory ,LSTM) 用于缓解RNN模型会出现的梯度消失或爆炸问题,它由记忆细胞、遗忘门、更新门及输出门组成,有效地解决了RNN在处理长时序数据时遇到的长期依赖问题,LSTM网络结构如图1所示。
基于BiLSTM的深度学习模型具体网络结构如表3所示,第1层为输入层,输入的是储运发箱行为姿态多维特征。第2层是平面化层,将多维数据特征压缩为一维特征。第3层是BiLSTM层,从前后两个方向挖掘数据中包含的内在信息。第4层是全连接层,它将来自前一层的所有神经元输出连接到本层的每个神经元上,神经元数目与行为姿态类别数保持一致。第5层是输出层,使用softmax激活函数转换为概率分布,表示数据属于每个类别的概率,从而完成最终的行为姿态识别。另外,本研究采用adam优化算法来更新深度学习模型中的参数,可以有效地避免过拟合现象的发生[15] 。
2 实验及结果分析
2.1 实验设备
硬件设备主要由振动传感器和工作站组成。振动传感器是基于cst92f25芯片集成的高性能振动状态监测元件,它可以同时测量X、Y、Z三轴振动速度、振动位移和振动频率,满足对振动与冲击全方位的测量。另外,它内部嵌套有数字滤波技术,可以有效地降低测量噪声,提高测量精度。工作站系统为Windows11 专业版64位,CPU配置为Intel Xore Silver4210R@ 2.40GHz (×2) 64GB, GPU配置为NADIA Ge⁃Force RTX 3090 24GB。软件运用方面,数据处理及分类模型代码的编写则主要在MATLAB 平台上进行。
2.2 实验环境及数据集介绍
考虑到储运发箱的特殊性,本研究采用缩比模型模拟储运发箱在运输途中的行为姿态。为了尽可能贴近实际场景,将缩比模型放置在平板拖车上并进行了固定,在正常道路以及坑洼道路拉动拖车模拟储运发箱可能会发生的四种行为,并记录相应的三轴振动数据。
通过实验,我们将四类行为姿态数据进行滑动窗口及特征提取处理,最终得到1 376组135维数据样本,其中平衡373 组、晃动390 组、碰撞271 组、翻滚342组。我们将数据组打乱,随机将其中70%作为训练组用于训练模型,另外30%作为测试组检测模型的适应性。
2.3 实验模型参数设置
本研究针对储运发箱行为姿态数据进行了大量的仿真实验,用于获取最优的模型参数,最终确定当BiLSTM中的神经元个数为128时,能够得到较高的准确率。同时设置训练 Batch-size 大小为 30;Epoch 设置为100;初始学习率设置为0.01,50次迭代后学习率降低为0.001。
式中,TP 是指模型正确预测为正类的样本数量;TN 是指模型正确预测为负类的样本数量;FP 是指模型错误地将负类预测为正类的样本数量;FN 是指模型错误地将正类预测为负类的样本数量;TP + TN + FP + PN为测试集中所有样本集合的数目。
实验模型在模拟环境下训练过程准确率及损失率的变化曲线图如图3所示,我们可以清晰地看到该模型虽然在训练前期准确率及损失率有着一定的波动程度,但最终趋于并保持稳定。同时,它有着较快的收敛速度,非常有益于在动态变化丰富的运输过程中进行姿态识别,能够快速适应新的数据分布,保持模型的性能。
在深度学习领域,混淆矩阵是评估分类模型性能的一种重要工具[17] 。它通过将模型预测的结果与真实标签进行比较,用来展示模型在不同类别上的表现。混淆矩阵的格式为N×N,N代表类别数。矩阵左侧为真实归属类别,底侧为预测输出类别,表格上数字代表真实归属于某一类(左侧类别)而模型预测输出为某一类(下侧类别),表格中百分数代表该分类结果样本数占测试样本总数的百分比。矩阵的主对角线代表分类正确的情况,其余为分类错误的情况。如图 4所示,验证了实验所提模型在模拟实验中能够对储运发箱在运输过程中的4种行为姿态进行准确的识别。
同时,我们将设置4种传统模型作为对照组进行比较,评价标准采用前文阐述的4项指标进行评判,以便客观公正地评估深度学习模型的性能。表4显示了实验模型与对照模型在F1 分数、平均召回率、平均精确率、准确率4项评判标准上获得的分数,可以看到BiLSTM模型在各项指标中都取得了最优结果,并且取得了99.76%的识别准确率,进一步验证了BiLSTM 模型在相较于传统模型的优势,即拥有更好的性能。另外,我们还可以使用立体直方图来描述各模型间性能的比较,它比表格更加形象化,可以直观地向我们展示它们之间性能的差异点,如图5所示,BiLSTM模型在4个指标下均具有超过99%的成绩,远远优于其他对比模型。
综合分析,BiLSTM模型的优异表现可归因于它独特网络架构,擅长于捕捉基于时间序列的长信号信息,能够从当前数据前后两个方向同时挖掘关联点。而储运发箱的行为姿态信息前后因果性强, 存在时间过渡行为,非常适合本研究采用的实验模型。
3 结论
针对储运发箱在运输过程中行为姿态的监控问题,本文介绍了一种基于振动传感器的行为姿态检测方法,以实现对储运发箱在运输过程中实时状态的监测。首先,本研究依据实际情况分析,定义了储运发箱在运输途中可能发生的4种行为姿态,并给予了详细说明;其次使用滑动窗口技术划分长数据以获取包含完整动作的时间片段,解决了可能因采用单一点数据而造成误判的情况;然后在这些片段上进行特征提取,进一步挖掘数据中的深层次信息;最后,使用基于BiLSTM的深度学习模型对4种行为姿态进行分类识别,通过模拟实验证明,取得了精准的识别效果,对储运发箱在运输过程中行为姿态的监控具有一定实际应用价值。