基于扩展卡尔曼滤波的目标追踪算法
作者: 冯燕
摘要:室内环境中由于存在各种障碍物,会导致出现多径效应问题,严重影响无线信号的接收信号强度值,从而无法实现对网络中目标对象的准确定位和轨迹追踪。针对这一问题,提出了一种基于扩展卡尔曼滤波的目标跟踪算法,提出算法利用目标移动时估算的信号强度值,结合接收到的信号强度值重构距离和信号强度之间的映射关系,采用状态转移方程估算当前移动位置的坐标,计算协方差矩阵,通过预测和更新两个阶段,实现对目标位置的动态跟踪。实验结果表明,提出算法能够准确追踪目标对象的运行轨迹,具有较高的定位精度。
关键词:多径效应;接收信号强度;扩展卡尔曼滤波;目标追踪
中图分类号:TP393 文献标识码:A
文章编号:1009-3044(2022)24-0053-03
1 概述
网络技术、通信技术和微传感器技术的快速发展[1],推动无线传感网络(Wireless Sensor Network,WSN) 广泛地应用于生活中的各个领域[2]。研究机构和研究人员针对WSN应用开展的大量的研究工作,基于WSN的目标定位与追踪是最主要的研究热点之一[3]。WSN由大量散布于监测区域的传感节点组成,可以实现对监测区域中目标对象的快速定位和追踪,这些传感节点能够估算目标之间的距离,例如立体视觉[4]、激光雷达[5]、超宽带[6]、Wi-Fi[7]等。利用设备上已有的硬件可以节省接收设备占用控件并降低WSN系统的成本,接收信号强度(Received Signal Strength Indicator,RSSI) 由于实现方式简单,无需在设备中新增外部设备,能够利用无线数据传输的物理效应来估算距离[8],进而实现目标的定位和追踪,得到了研究人员的广泛关注。
无线信号在空气中传输时,信号强度会随着传输距离的增大而逐渐衰减,RSSI和收发器之间的距离存在映射关系,根据不同的传输环境,提出了一些经典的无线信道模型,如自由空间模型[9]、瑞利分布模型和对数-正态模型[10]等。根据这些信道模型,利用网络中传感节点接收到的RSSI值可以估算出监测区域中目标对象的位置,并对其进行动态跟踪[11]。采用RSSI指纹识别是目前采用较多的一种目标跟踪方法,该方法需要提前获悉监测区域的环境部署,预先创建室内环境的无线信号辐射图,随着目标对象在监测环境中移动,通过匹配RSSI的变化确定目标的位置以实现对目标的跟踪。但是,这种方法需要在使用前进行大量、烦琐的映射,而且对检测区域信号辐射环境和信号发射环境变化高度敏感,当监测环境中存在比较严重的多径效应时,会影响目标定位和追踪的精度。
在室内环境中,存在墙壁、门、窗和办公家居等多种障碍物,而且还经常会出现移动的人,这些障碍物会导致室内环境中存在严重的多径效应,从而影响RSSI的精度,进而降低对目标追踪的精度,针对这一问题,提出了一种基于扩展卡尔曼滤波的目标追踪算法,该算法根据机器人位移估算的RSSI和接收到的RSSI重新构建RSSI与距离的映射关系,考虑室内环境中存在的多径效应问题,利用状态转移方程估算下一阶段机器人的移动位置,通过预测的更新阶段,准确获取机器人移动的每一步位置。基于实际的室内办公环境对提出算法进行验证,实验结果表明,采用提出算法可以很好地预测目标对象在监测区域的移动轨迹,得到较低的定位误差。
2 RSSI与距离映射关系
考虑一个存在n个传感节点,m个目标对象的WSN系统,每个传感节点的位置已知,[xi=xi,yi, i=1,2,...,n],目标对象位置未知,随机部署在监测区域中,需要利用网络中部署好的传感节点追踪目标对象的位置和运行轨迹。对于室内监测区域,目标对象能够接收到通信半径内的多个传感节点的信标报文,每个报文中都存储着对应传感节点的ID和位置信息。可以采用对数-正态模型来描述无线信号在室内环境的RSSI分布特性,对应的RSSI表示为:
[RSSI = P0+10⋅np⋅log10dd0] (1)
其中,[np]表示路径衰减因子,它是一个动态参数,会随着环境的不同而变化;d表示无线信号传输距离,单位为米;[d0]表示参考距离,一般将其设为1米;[P0]表示参考值,通常指距离为1米处的RSSI值。对数-正态模型提供了一个对数衰减过程,可以通过调整模型中的多个参数来适应不同的室内环境。通过对式(1) 进行转换,对应的距离d表示为:
[d=10RSSI-P010⋅np] (2)
式(2) 无需提前预知每个发射器和接收器的传输功率和增益,通过路径衰减因子和RSSI参考值可以快速估算出室内环境中传感节点与目标对象之间的距离,进而实现对监测区域中目标对象的定位和追踪。但是在式(2) 中,仅通过路径衰减因子[np]来反映室内监测区域中存在的环境变化,几种典型室内环境的路径衰减因子[np]的取值如表1所示,从表1可以看出,对于同一类室内区域,通常采取相同的路径衰减因子值,但是在实际环境中,同一类室内区域中的不同空间的环境可能存在非常大的差异,如,同一楼层办公区域中的大厅和办公室的环境差异比较大,大厅一般空间较大,障碍物少,而办公室空间狭窄,障碍物多,存在明显的多径效应,但是同一楼层办公区域通常采用相同的路径衰减值,因此在进行目标追踪时会产生较大的误差。
3 基于扩展卡尔曼滤波的目标追踪算法
考虑在室内监测区域中随机部署1个移动机器人,该机器人上装配着无线收发器可以接收到WSN网络中各传感节点的RSSI,仅考虑传感节点和移动机器人之间的距离关系,采用扩展卡尔曼滤波方法实现对移动机器人的目标定位和追踪。在室内环境中,由于存在家具、墙壁、行走的人等障碍物,存在严重的多径效应。为了减少多径效应对RSSI的影响,结合机器人通过线性位移估算的RSSI和接收到的RSSI值来对每个位置的RSSI进行预处理。机器人在监测区域移动时,除了能够接收到通信半径内各个传感节点的RSSI值,也能够利用自身携带的传感器的位移生成估算的RSSI,当机器人在进行RSSI测量时,如果已经移动了一段距离,则将移动距离之间的估算的RSSI最大值和距离增加移动距离的RSSI相关联,最小值与距离减少移动距离的RSSI相关联。预处理后的RSSI可以表示为:
[RSSIm = P0+10⋅np⋅log10d±Δd] (3)
对于给定距离d的RSSI值,如果RSSI的变化为正值,则偏离量为正,否则为负。采用扩展的卡尔曼滤波器来估算目标对象的状态,主要包括目标对象的坐标、方位等,可用状态向量x来表示:[x=[x,y,θ,x1,y1,θ1,x2,y2,θ2,…,xn,yn,θn]],其中[x, y,θ]表示机器人初始位置的坐标和方位,[xi,yi,θi]表示第i个传感节点的坐标和方位。当机器人在监测区域移动时,可以将从i位置移动到j位置的数据用一个向量组表示为:[∆x=[∆d,∆θ]],对应的状态转移方程可以表示为:
[fxk+1,Δx=xk+Δx×cosθk+Δθ,yk+Δx×sinθk+Δθ] (4)
其中,k+1表示下一阶段滤波器迭代的值,k表示当前状态的预测值。式(4) 是一个非线性方程,根据控制向量组预测下一个状态,通过获取系统的线性化模型,对应的观测函数h可以表示为:
[hxk=x-xi2+y-yi2] (5)
其中,下标i表示网络中的第i个传感节点,观测函数h将状态变量转换为测量向量形式,测量向量中包含与当前状态中各传感节点的估计距离值,因此,观测函数需要获取传感节点与机器人当前位置之间的距离。式(5) 表示一个非线性函数,为了让滤波器能够更新测量阶段的协方差,利用雅可比行列式得到其对应的线性化形式,其对应的雅可比行列式G可以表示为:
[G=x-xix-xi2+y-yi2 y-yix-xi2+y-yi2 0] (6)
利用最后一次滤波器迭代的值,使用扩展卡尔曼滤波器更新协方差矩阵,构建机器人相邻移动节点的距离方程,将状态变量转换为测量向量形式的观测函数,该函数中包含与当前移动位置相关的距离映射关系。通过预测和更新两个阶段,可以得到机器人每一步的坐标位置和协方差。
4 性能分析
在一个面积为100平方米的办公区域随机部署能够覆盖整个区域的传感节点,每个传感节点的发射功率都设置为0dBm,周期性地广播信标报文,1个配备无线收发器的移动机器人在监测区域移动,给定机器人的初始位置,机器人在监测区域内进行线性或旋转运动,对于机器人每一次的移动,都定义一个指定的初始位置和预设好的运行路径,每隔0.1秒从各个传感节点收集RSSI值。在监测区域中,给机器人指定运行轨迹进行测量,选择直线轨迹、圆角矩形轨迹、圆形轨迹和弧形轨迹进行目标跟踪,每次运动之间的差异受到高斯噪声的影响,为了减少测量误差对目标跟踪结果的影响,对每一种运行轨迹重新测量100次。为减少多径效应的干扰,将在每个位置采集到的RSSI进行加权平均后传递到预过滤阶段进行处理。
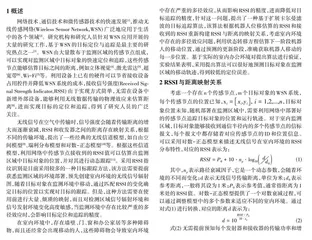
图1描述了机器人在办公区域的一个5米×5米的办公室沿圆角矩形轨迹进行移动的过程,在测试过程中,该办公室部署了8个传感节点,机器人需要沿着图中预设的圆角矩形进行移动。从图中机器人的实际运行路线可以看出,机器人能够沿着预设的圆角矩形进行移动,通过部署在办公室的8个传感节点可以很好地实现对目标机器人的定位和运行轨迹追踪。当机器人沿着矩形轨迹中的直线进行移动时,运行路线基本能够和预定轨迹一致,因为机器人在直线运行时,只需要考虑其和传感节点之间的距离,通过提出算法可以准确地根据当前状态获得下一次移动的位置。当机器人遇到圆角矩形区域的弧形拐角区域时,实际运行路线会稍微偏移预定轨迹,但偏移的程度较低,这是因为在圆角矩形的弧形拐角区域,由于角度偏移量接近90度,机器人除了要计算距离,还需要计算偏转的方位,偏转角度过大会导致机器人在进行位置估算时出现一定的误差,从而导致出现在弧形拐角区域出现偏离预定轨迹的情况。
机器人在办公区域沿圆角矩形轨迹进行目标追踪的定位误差情况如图2所示,图中横坐标表示迭代次数,纵坐标表示定位误差,从图中可以看出,当机器人沿直线运行时,目标追踪的定位误差较低;当机器人遇到圆形拐角时,目标追踪的定位误差较大,这是由于机器人遇到圆形拐角时需要旋转自身方向并计算对应的角度,由于圆角矩形框的弧形拐角位置的角度偏移接近90度,机器人在移动过程中进行位置估算时会出现旋转角度不准确的情况出现,而且在狭小的办公室环境中,由于墙壁和其他障碍物的存在,会存在多径效应,导致计算方位时也会出现一定的偏差。在目标追踪区域为5米×5米的办公室环境中,能够实现对机器人的移动轨迹追踪,其平均定位误差为0.65米。
5 结束语
室内目标追踪是WSN领域的研究热点,室内环境复杂多变,墙壁、门窗和家具等障碍物会导致多径效应问题,严重影响无线信号的RSSI值,导致无法实现对网络中目标对象的准确追踪。针对室内复杂环境中存在的问题,提出了一种基于扩展卡尔曼滤波的目标追踪算法,提出算法融合机器人移动过程中估算的RSSI和从传感节点处接收到的RSSI,重构RSSI和距离之间的映射关系,采用状态转移方程估算当前移动位置的坐标,通过预测和更新两个阶段,实现对机器人运动轨迹的定位和追踪。实验结果证明了提出算法的有效性,当机器人在室内运动时,提出算法能够准确估算机器人每一步的移动坐标,实现对其的移动轨迹追踪,尤其当机器人在直线上移动时,由于只需要考虑和传感节点之间的距离和自身的移动距离,机器人可以准确地沿着预设的直线轨迹进行移动。
参考文献:
[1] 卢超超,彭炜.基于无线传感人脸识别的空间弱小人体目标跟踪方法[J].传感技术学报,2022,35(3):405-411.
[2] 杨其利,周炳红,郑伟,等.基于全卷积递归网络的弱小目标检测方法[J].光学学报,2020,40(13):49-61.
[3] 杨小龙,吴世明,周牧,等.室内穿墙场景下的无源人体目标检测算法[J].电子与信息学报,2020,42(3):603-612.
[4] 张小娅,田增山,李玲霞.室内Wi-Fi网络下的被动式运动目标检测算法[J].计算机应用研究,2021,38(3):841-844,850.
[5] 包晓敏,王思琪.基于深度学习的目标检测算法综述[J].传感器与微系统,2022,41(4):5-9.
[6] 张索非,冯烨,吴晓富.基于深度卷积神经网络的目标检测算法进展[J].南京邮电大学学报(自然科学版),2019,39(5):72-80.
[7] 杨建秀,刘桂枝.特征增强的小目标检测算法[J].山西大同大学学报(自然科学版),2020,36(6):16-19.
[8] 李赛.人体运动图像的目标模糊模式识别算法[J].微电子学与计算机,2019,36(12):89-92.
[9] 刘龙,樊波阳,刘金星,等.面向运动目标检测的粒子滤波视觉注意力模型[J].电子学报,2016,44(9):2235-2241.
[10] 马也,常青,胡谋法.复杂背景下红外人体目标检测算法研究[J].红外技术,2017,39(11):1038-1044,1053.
[11] 董晨,李磊,张皓宇,等.无线传感网络安全防护路径激光追踪方法[J].激光杂志,2021,42(1):134-138.
【通联编辑:谢媛媛】