类人机器人的非智力因素
作者:三联生活周刊(文 / 吴戈)
 ( 本田机器人阿西莫 )
( 本田机器人阿西莫 )
比尔·盖茨最近在《科学美国人》杂志上写了一篇文章《家家都有机器人》,他感兴趣的原因是:“这也是一个高度分散、各自为政的行业,(在软件和硬件上都)几乎没有统一的标准或平台。如果有人想开发新的机器人,通常得从零开始。(因而)开发项目复杂、进展缓慢,可投入实际应用的成果寥若晨星。谁也说不准这个行业何时才能成长到临界点。”
从2004年起,盖茨就注意到:随着计算和存储能力,以及传感器、电机等硬件设备日益廉价,一群世界最聪明的人正在试探机器人的种种可能。现在,他说:“我完全能想象,机器人将成为我们日常生活的一部分。我坚信,分布式计算、语音与视觉识别以及无线宽带网络等新技术,将为我们开启通向新一代自主式装置的大门。”
盖茨的思路出发点是“电脑将走下办公桌”,达到能看、能听甚至操纵东西的水平。他把机器人看做电脑功能延伸的产物,或者就是电脑的外部设备,虽然到处走动,但出于成本考虑,视觉识别和导航之类强大的“脑力”甚至可以留在电脑上,通过无线通信完成。
目前,不光机器人的智力仍处在婴儿水平,用“管子、活塞、齿轮和杠杆”组成一个灵巧的“人”同样不容易。
邯郸学步
 ( 韩国第一种 商业化的类 人机器人 Robonova
)
( 韩国第一种 商业化的类 人机器人 Robonova
)
本田公司的“阿西莫”是近两年的机器人明星,它能小跑、上楼梯甚至跳舞,但因为所有26个关节都有电动机,40伏的电池只够小心翼翼地连续行走一小时,每走一步都要小心校准。
最早模仿人的“被动行走”的是玩具商。1938年美国人约翰·威尔逊发明了玩具“行走者”。不用电池或发条,放在一个平缓的斜坡上,它的两条有关节的腿就能靠重力蹒跚而行。80年代初,哈佛的托马斯·麦克马洪提出钟摆式行走机器人,但直到1990年机器人才实现以接近人的步法平稳下坡,到2005年已有三种关节柔韧、步法相当自然的被动行走两足机器人问世。要在平地行走,只需靠小腿上的弹簧拉伸、释放,就能补偿每次脚落地的能量损失,能耗不比人类行走高,效率比“阿西莫”高约15倍。如果能应用人造肌肉,能耗将更低。
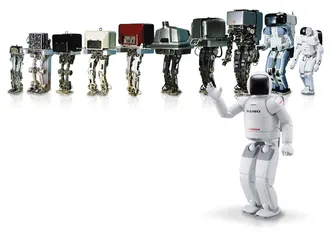 ( 本田公司不同时期的两足机器人 )
( 本田公司不同时期的两足机器人 )
被动行走机器人最大的不足是不能应付障碍,地面不平或不硬就要摔跟斗,甚至无法跌倒后自己站起来,因此它还需要与主动装置结合。荷兰Delft理工大学的Denise机器人学会了调整脚步,当它向右偏,下一步就会落到偏右的位置,恢复平衡。麻省理工大学的“学步儿童”只有43厘米高,但它会通过脚底的传感器感受身体的倾斜,在膝盖、脚踝和臀部合理用力,适应地毯和砖块等不同地面。
如果要在家里侍奉左右,机器人更大的难题是穿过从沙发、气球到正蹒跚行走的孩子等迥然不同的障碍。越来越便宜的摄像头、激光脉冲探测仪等装置很容易不断为它描绘周遭的环境,但权衡速度、安全和新变化需要它有下棋一样的能力,随时决定什么东西可以挪走,什么需要绕过。
 ( 2003年日本开发的第一个类人 机器人接待员Actroid )
( 2003年日本开发的第一个类人 机器人接待员Actroid )
握住它
“20多年了,我们使机器人学会走路而不碰壁,却忘了要它走过去干什么。”NASA约翰逊航天中心的迪夫特勒说。单从灵活性上看,NASA于2005年春提出的目标也只是20年内制造出手工灵敏度与6岁小孩相当的机器人。

传统机器人每个关节的位置都能随时精确控制,这对生产线有用,却连日常生活也应付不了。拿杯子,启动汽车,翻书,不同的事需要截然不同的动作。要准确控制手指的位置和力度,要么为机器人设计出能对付它将遇到的所有物体的程序,要么让它学会调节。
迪夫特勒负责的Robonaut是目前最灵巧的机器人,42个传感器为它的手带来了细腻的感觉,12个独立的运动方向使它可以适应复杂的物体。它能用镊子捡起小螺钉,抓住一根扶手,套上钩子和绳索,作为太空行走的安全带,还能用一套工具开关舱门,目前正在练习修建太空建筑。不过这些能力并不全靠它自己,通过虚拟现实头罩和手套,机器人的视觉和触觉传给操纵员,有时实际上利用的还是人眼和人脑。考虑到火星发回的无线电信号延迟达42分钟,机器人必须学会真正自主地工作。
 ( NASA的机器宇航员Robonaut将与人类搭挡
)
( NASA的机器宇航员Robonaut将与人类搭挡
)
马萨诸塞州大学的机器人Dexter有一个“婴儿大脑”,能通过玩耍学习操纵物体,目标是接近6岁儿童的能力。每接触一个物体,它都记录下手的运动和握力,积累真实经验。见到新物体时,就可以与经验比较,决定接触和抓握的方法,它甚至学会了把不同类型的塑料瓶装进纸袋里。它还有“归类概括”能力,学会用两指握住苹果后,也会借鉴类似技巧,用两手握住大得多的沙滩球。麻省理工大学的Obrero独臂机器人指尖和手掌都有人造皮肤,能感知物体的存在和需要的力度,从而抓住正从手指中滑落的物体,还能在桌子上摸索物品。东京大学的“电子皮肤”已经能感觉压力和温度变化,今后还可能感觉光、湿度甚至超声波。导电塑料制造的人工肌肉通过电化学方法控制收缩,也可能超过人力。
惟妙何必惟肖
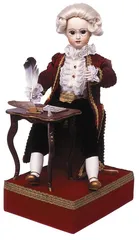 ( 中世纪的机器玩偶
)
( 中世纪的机器玩偶
)
计算机里的虚拟人已经充分迷惑了我们的感官,真实世界的类人机器人最多在迪斯尼乐园扮扮海盗。在京都附近的ATR实验室,一个助手正戏弄着与他的上司、大阪大学机器人专家石黑宏一模一样的机器人Geminoid HI-1。正在隔壁房间看着监视器的石黑宏一边喊叫,一边点了几下鼠标,他的化身就扭过头去,一脸不悦。
2002年,石黑就以当时4岁的女儿为模板,完成了Repliee R-1,眼睛、眼睑、嘴和颈都可以动,有一定的触觉。2003年,他与仿真制造公司Kokoro合作,制成了更逼真的成年女性机器人Repliee Q1。它有人类下意识的细节举止,这使70%的被试者5至10秒内都没有认出它是机器人。
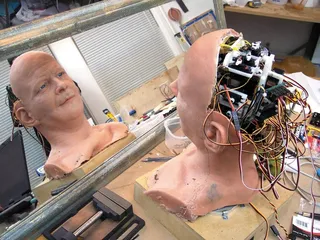 ( 大卫·汉森制作的模仿科幻作家菲利普·迪克的机器人
)
( 大卫·汉森制作的模仿科幻作家菲利普·迪克的机器人
)
2005年,石黑以电视主持人藤井斐子为模板制成了升级版的Repliee。它能感知周围有人,能与人简短对话。表面有柔软的硅树脂皮肤和真实的头发,头部和上身各有13个和39个制动器提供表情和动作。最新的Geminoid HI-1用形状记忆塑料和石膏从真人翻模而成,带压电膜的皮肤能感受压力,还输入了石黑宏的习惯姿态和下意识动作,46个制动器中有一个专管他招牌式的皱眉。
其实识破石黑宏的伎俩并不需要找出机器人背后提供动力的空气压缩机,也不需要让它站起来,说几句话就行。这迫使石黑选择了亲自和化身演双簧。实际上,机器人的状态、情绪都需要他来选择,它擅长的只是每个状态会触发约20个细节动作,比如呼吸、眨眼和坐立不安,包括通过红外摄像机捕捉石黑的嘴唇运动加以模仿。石黑也承认:复制更多的是一种冲动,没有终极目的,完美的类人机器人可能永远都缺少“点睛之笔”。
情商比智商重要
且不说主人对管家性格的喜好,搞不懂你的情绪,机器人就可能在你头痛时进来打扫房间,你想在沙发上打个盹时,它却为你打开电视。研究这种问题,早稻田大学类人机器人中心主任桥本俊治使用的“机器人情感工程”概念也许过于机械,还是艺术家马瑞·维洛纳基举办的“鱼—鸟”展览更为贴切。这位悉尼大学机器人中心的博士后认为:人与智能机器的关系如同鱼和鸟相恋的希腊童话,二者并不在同一空间生存,但需要学会接受相互的不同。她制造的一对机器人外观是轮椅,却非常情绪化。它们能通过蓝牙、红外/激光传感器和摄像机相互感知,还有7种情绪、3种自我情感认知和3种相互情感状态,记忆中每次相互交往的细节都会影响情绪,并通过运动和打印文字与人交流。
研究发现,只要有机器人在场,就足以影响人的行为方式,而且人对沟通的想象和期待远远超出了机器人能做的。如果麻烦主人戴上一些生理传感器,让机器人能测出紧张和脉搏加快等迹象,它至少能有直觉判断:现在不是送上电视节目或晚餐菜单的时机。如果有面部和姿态识别系统,机器人能更快学会察言观色。美国伊利诺伊大学的软件已经能识别出耸肩等细微情绪动作,不过竖起中指最好别纳入它的识别范围。
同宠物一样,越来越可爱的机器人也常常使人忘记:它们一旦出错也会有危险。如果说1981年川崎工厂的工业机器人把一名工程师塞进磨床只是把人错当成了零件,当机器人成为接待、保安、演员、搬运工、导游和清洁工时,犯错的后果就不好预测了。2005年12月公开的“阿西莫”型号已经在冈山的一个本田研发中心担任接待,但公司表示至少10年后才可能上市,因为它现在连不把热咖啡洒到客人身上也不能保证。
在律师们看来,机器人同宠物一样可能自行其事,但主人必须负责。日本政府已经着手建立2010年后应用的家用和公共机器人安全标准。为此名古屋大学正在研究“危险索引”,机器人肢体每一个可能的运动和机器人本身的轨迹都被设定一个危险值,只有对人、宠物或昂贵家具没有危险的动作才能执行。加拿大不列颠哥伦比亚大学则给人提供了取消权,如果你刚下一个指令就改了主意,只要举起手,机器人就不会执行。更简单的安全程序在机器人的触觉传感器发现意外接触超过安全限度时,会使肢体变软。
当然,也许我们对机器人不出错的期望太高。曾为本田和索尼的类人机器人计划担任顾问的佐治亚理工大学教授罗纳德·阿金说:指望所有危险都能通过程序设计排除是不现实的,“为什么要对机器人提出比对人类接待员还高的标准?人也不能应付可能遇到的一切啊!”南丹麦大学的约翰·哈拉姆说:“汽车和司机也要出错,丰田和本田就是汽车商,他们有经验。”
(感谢《科学美国人》杂志中文版《环球科学》对本文的帮助)
类人名角
2003年,美国出现有28种面部表情的机器人K-bot;2005年美国的大卫·汉森制成模仿科幻作家菲利普·迪克的机器人,以及模仿爱因斯坦的阿尔伯特·胡伯,还带有德国口音;2003年日本开发了第一个类人机器人接待员Actroid,外表是20多岁的日本女子;韩国第一种商业化的类人机器人Robonova于2005年年底问世,售价90万韩元;2006年3月日本物理与化学研究所展示了机器人护士Ri-Man;4月韩国推出家用机器人Jupiter;5月韩国生产技术研究院公开了以韩国美女为模板的EveR-1;11月日本的Ubiko机器人开始以445美元/小时的价格出租,已有20家公司订购。
这些机器人有表情和动作,能识别人,能听、说部分语言,2006年8月中科院自动化所开发的我国首台美女机器人也属于这一类。不过真正在功能上继续突破的还是另一类同伴。麻省理工学院研制的Domo身体多个部位都有弹性,能感知物体的反作用力,从而决定以多大的力量拥抱你,而不会让你窒息。京都大学高桥友贵开发的FT一改“阿西莫”那种双膝弯曲的老妪步态,学会了扭摆臀部的模特走法。早稻田大学的WT-6有电动机驱动的横膈膜,使压缩空气经过人工声带、舌头、嘴和鼻腔,能清晰地发出日语的50个音,还能模仿一些新词。卡耐基·梅隆大学的Ballbot利用光纤陀螺,能在一个球上保持直立,耶鲁大学的Nico能够认出镜中的自己,加州大学的USC RMP则能对周围的新地形迅速形成三维地图。 机器人非智力因素