基于LSTM神经网络的来袭导弹制导律识别方法研究
作者: 袁则华 崔颢 徐琰珂 王龙 周桃品
摘 要: 三体对抗场景下, 对来袭导弹制导律的准确识别可以为其轨迹预测提供有力支持。 针对此场景中来袭导弹运动与目标运动呈现半合作特征的特点, 在收集导弹轨迹数据时加入不同目标机动, 使数据更加贴合实际。 提出了一种基于长短期记忆(Long Short-Term Memory, LSTM)神经网络的制导律识别方法, 对来袭导弹制导律的类型进行识别。 设计了一种加入注意力机制的LSTM神经网络, 提高了网络模型的自适应能力以及泛化能力, 使识别准确率及识别精度大幅度提高。 实验结果证明, 此方法识别准确率较高, 且识别所需时间小, 可以满足弹上使用需求。
关键词: 神经网络; 制导律识别; LSTM; 三体对抗; 注意力机制
中图分类号: TJ765; V249
文献标识码: A
文章编号: 1673-5048(2024)06-0057-07
DOI: 10.12132/ISSN.1673-5048.2024.0100
0 引 言
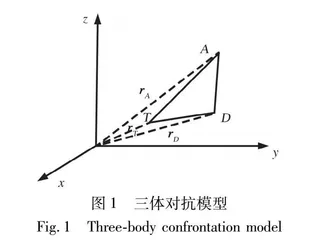
随着现代化武器技术的不断发展, 空战攻防场景的复杂度不断提高, 传统的一对一攻防场景有时无法满足战场需求。 同时, 随着来袭导弹多模导引和复合制导方式的普遍采用以及机动能力的不断提升, 传统的被动对抗手段越来越难以奏效。 因此, 由主动防御引发的三体对抗问题成为研究热点[1-2]。 典型的三体对抗场景一般存在我方载机(T)、 来袭导弹(A)、 我方拦截弹(D)三种飞行器, 三体对抗模型如图1所示。 这种作战场景与传统的追逃模式不同, 具有更强的复杂度, 也为战场博弈提供了更多的可能性[3]。 在三体对抗场景下, 来袭导弹以攻击我方载机为目标, 其运动轨迹与我方载机的运动强相关, 呈现较强合作特性, 且目前国内外的空空/面空导弹的制导律大多是以比例导引为基础, 这为来袭导弹类半合作目标的轨迹预测带来了可能性。
然而, 由于环境的不确定性、 模型泛化能力有限及训练数据的局限性等原因, 随着预测时间的延长, 轨迹预测的误差会逐步积累, 导致长时间预测准确率迅速下降, 这种误差积累效应在导弹轨迹预测这种复杂、 非线性轨迹预测任务中尤为明显。 如果能预测出来袭导弹的制导规律, 通过弹道仿真, 就能够获得来袭导弹未来的航迹信息。 这样不仅可以摆脱对数据的依赖性, 还能降低各种不确定因素对预测的影响, 使长时间轨迹预测更加精准。 在三体对抗场景下, 来袭导弹在交战中测量自身与其目标的相对运动信息, 按照预定的制导律控制自身的航迹变化从而实现对其目标的精确制导。 不同的制导律及其参数对来袭导弹轨迹的影响主要体现在导弹的弯曲程度上, 制导律识别解决来袭导弹采用何种典型制导律及其制导参数, 进而基于三体对抗场景, 改善轨迹
精度。 因此, 本文对来袭导弹的制导律识别进行研究。
因来袭导弹的运动轨迹与目标的运动呈现半合作特征, 需要对目标机动进行研究。 从20世纪开始, 学者们就开始研究战斗机的机动方法, 以此来规避导弹的攻击。 随着多年的研究和发展, 对机动方法的研究取得了显著进展。 杜瑾等[4]运用数字仿真技术构建了飞机机动库, 用较少参数刻画不同机动动作。 吴家湖[5]给出了非常规机动运动的非线性数学模型, 并总结了常规机动与非常规机动共10种机动。 李昭锐等[6]重点对滚筒机动进行建模仿真, 分析了滚筒机动规避导弹的效果。 苏光旭等[7]在机动动作仿真时加入气动数据, 建立了典型战术机动库, 并对机动动作进行可视化研究, 可以更直观地得到飞行参数。
目前关于制导律识别的工作研究较少, 大部分都是基于多模型自适应的方法。 Fonod等[8]设置多个卡尔曼滤波器并行运行, 每个滤波器代表一种对方可能使用的拦截弹制导律, 采用非线性多模型自适应的制导律辨识方法对来袭弹制导律进行辨识。 杜润乐等[9]采用一种通用的隐式制导函数对制导行为进行统一描述, 并将低通滤波与卡尔曼滤波相结合, 对制导律进行分析辨识。 蔡远利等[10]基于三体对抗场景, 建立了多模型自适应滤波算法来辨识拦截弹的的制导律。 然而, 在可查的参考文献中, 基于多模型自适应的方法一般需要2 s甚至更长时间才能识别出来袭导弹的制导律[10-11], 但是在真正的战场中往往需要更快的识别速度以获得战场中的优势。 神经网络拥有高度优化的结构和可以并行处理的特点, 可以做到在短时间内快速而准确地进行识别。 因此, 使用神经网络进行制导律识别的方法也开始被关注和研究。 王因翰等[12]发明了一种基于GRU的制导律快速辨识方法, 来识别比例导引制导律或增强比例导引制导律。 王江等[13]使用神经网络对协同制导律进行快速回归辨识。 Wang等[14]假设采用比例导航制导律的导弹对空中目标进行攻击, 建立了基于GRU神经网络的参数辨识模型, 并提出一种改进的多模型机制输出处理方法。 目前, 使用神经网络方法对制导律进行辨识的文献较少, 还需要学者和专家们的进一步研究。
本文选用基于神经网络的制导律识别方法。 首先, 运用仿真软件模拟导弹和目标的轨迹, 获取神经网络训练所需的数据; 考虑来袭导弹3种不同的制导律形式以及载机8种不同的机动动作生成仿真轨迹数据, 将使用同一种制导律的导弹轨迹划分为一类, 再用LSTM神经网络对不同类别的制导律进行识别; 提出一种基于注意力机制的LSTM神经网络, 提高了网络的整体性能。 经过仿真实验验证, 基于LSTM神经网络的制导律识别方法能够确保识别率, 且大幅度减少识别所需时间。
1 模型建立
本文收集的数据需要在普通弹道的基础上加入不同的目标机动, 从而获得不同目标机动下的导弹轨迹。 因此, 模型的建立包括弹目相对模型以及目标机动模型两部分。
1.1 三维比例导引模型
来袭导弹与载机的相对运动模型如图2所示。
图中, OXYZ为地面坐标系, OXLYLZL为视线坐标系; θm, ψm分别为导弹的弹道倾角和弹道偏角; ψt为目标的弹道偏角; θl, ψl为目标视线的倾角和偏角。
传统的比例导引法接近目标时的需用法向过载有较大波动, 这会影响导弹的稳定性和命中精度。 因此根据文献[15]对其进行改进得到:
ny=K1|R·|θ·l+ω1(1)
nz=K2|R·|ψ·l+ω2(2)
式中: ny, nz为弹道坐标系内的俯仰通道过载和偏航通道过载; K1, K2为比例系数; ω1, ω2为附加增量。 对ω1, ω2进行合理取值, 可以补偿引起目标线转动的几个因素, 减小需用法向过载的波动。 弹目相对运动模型为
R·=vtcosθlcos(ψl-ψt)-[cosvmcosθlcos(ψl-ψm)+sinθmsinθl]vm(3)
Rθ·l=-vtsinθlcos(ψl-ψt)-[sinθmcosθl-sinθlcosθm·
cos(ψl-ψm)]vm-Rcosθlψl=-vtsin(ψl-ψt)-
vmcosθmsin(ψl-ψm)(4)
又有
ny=vmθ·m/g+cosθm(5)
nz=-vmcosθmψ·m/g(6)
则由式(1)~(2)、 式(5)~(6)可得
θ·m=g(ny-cosθm)/vm(7)
ψ·m=-gnz/(vmcosθm)(8)
先将式(4)求导, 再将式(3)代入式(4)可得
Rθ¨l+2R·θ·l=vtψ·lsinθlcos(ψl-ψt)-[cosθmcosθlθ·m+sin(ψl-ψm)(ψ·l-ψ·m)sinθlcosθm]vm(9)
使导弹的切向加速度以及重力引起的弹道需要过载在命中点处的影响为零, 即可通过式(7)~(9)求解出ω1和ω2。
本文在比例导引的基础上进行改进, 得到改进比例导引律以及变结构比例导引律。 根据文献[16]得到有落角约束的变系数改进比例导引律:
ny=K1Vθ·l/g+cosθm(10)
nz=K2Vψ·l/g(11)
K1的自适应更新方程为
K·1=kVsinθ(K1-N)/h(12)
式中: N=(θq-θm)/(θq-θl), θq为期望弹道倾角, 当N>2时K1=N, 当N≤2时K1=0.8; V为导弹速度; h为导弹高度; k为增益系数, 且k>0。
根据文献[17]得出变结构导引律:
ny=(N1+1)R·θ·l+ξ1(θ·l/R)/|θ·l|+δ1(13)
nz=-(N2+1)R·1ψ·l+ξ2(ψ·l/R1)/|ψ·l|+δ2(14)
式中: R1=Rcosθl; N1, N2为大于零的常数; δ1, δ2为常数; ξ1, ξ2为变结构增益。
1.2 目标机动库构建
除典型机动外, 本文目标机动库加入组合两种典型机动的扩充机动, 更加贴近实际。 目标机动库共有8种机动, 包括平飞机动、 盘旋机动、 筋斗机动、 蛇形机动、 滚筒机动、 螺旋上升机动6种典型机动, 以及破S机动和殷麦曼机动2种扩充机动。 目标机动库模型覆盖了典型的攻防对战场景。
以蛇形机动为例对目标机动库中的机动进行介绍。 蛇形机动在XOY平面内, 目标沿X轴前进, 同时沿Z轴正弦运动。 蛇形机动轨迹如图3所示, 轨迹可描述为
x=x0+v3xt(15)
y=y0(16)
z=z0-a3ω2cos(ωt+ω0)(17)
式中: a3为加速度; v3x为X轴初速度; ω, ω0分别为机动频率和初相位。
2 基于LSTM神经网络的来袭导弹制导律识别
2.1 LSTM 神经网络
长短期记忆(Long Short-Term Memory, LSTM)[18]是一种特殊的循环神经网络(Recurrent Neural Network, RNN), 与 RNN重复模块中只包含单一的层不同, LSTM 通过在重复模块中加入4个交互的层来避免长期依赖问题的出现, 解决了循环神经网络长序列训练过程中的梯度消失和梯度爆炸问题。
由于LSTM神经网络具有记忆单元, 能够捕捉长期依赖关系, 非常适合处理具有长期依赖关系的序列数据, 在时间序列预测等领域被广泛应用[19-21]。 本文的数据属于序列数据, 所以选择使用LSTM神经网络来训练数据。 LSTM 模型的结构示意图如图4所示。