基于Bi-LSTM的电子装备故障预测方法研究
作者: 倪祥龙 石长安 麻曰亮 刘磊 何健
摘 要:为提高电子装备故障预测结果的准确性,提出一种基于Bi-LSTM的电子装备故障预测方法。首先,在研究长短时记忆网络(LSTM)的基础上,提出将双向长短时记忆网络(Bi-LSTM)应用于电子装备故障预测,并给出基于Bi-LSTM的故障预测方法;其次,研究了模拟电路健康度的提取方法,并以某雷达带通滤波放大器的模拟电路为例开展基于仿真数据的故障预测研究;最后,将基于Bi-LSTM的故障预测方法应用于雷达发射机的三组状态监测数据中,开展基于实际数据的故障预测研究。通过电子装备仿真数据案例和实际数据案例的对比分析,说明基于Bi-LSTM的故障预测方法明显优于循环神经网络(RNN)和LSTM,能够提高电子装备故障预测的准确性。
关键词:故障预测;Bi-LSTM;PHM;数据驱动;电子装备;模拟电路;武器装备
中图分类号:TJ76; V216.6
文献标识码:A
文章编号:1673-5048(2022)06-0102-09
DOI:10.12132/ISSN.1673-5048.2021.0234
0 引 言
电子装备在军队武器装备系统中占有重要地位,其性能优劣将直接影响到武器系统综合作战效能乃至战场态势。随着电子技术的不断发展和制造工艺的逐步提升,电子装备结构日趋复杂,对维修保障提出了更高的要求。作为新理念,故障预测与健康管理(Prognostics and Health Management,PHM)技术已经在各国军事和民用部门得到广泛的研究,并被用于武器装备维修保障领域[1]。
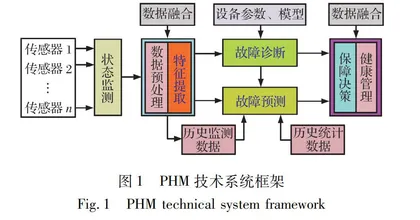
PHM技术[2]是指利用传感器采集到的各种数据,通过智能推理算法来诊断和预测系统或部件故障,评估其健康状态和寿命,并提供一系列的视情维修和健康管理决策,保障系统或部件可靠运行,其系统框架如图1所示。故障预测是PHM技术的核心之一,主要包括系统健康状态评估、性能参数趋势预测、剩余寿命(Remaining Useful Life,RUL)预测等。故障预测方法一般分为基于模型和基于数据驱动两种[3-4]:基于模型的预测方法主要是根据对象的物理失效模型(如磨损、疲劳和老化等)来进行预测,不同的物理失效具有不同的失效演化规律;基于数据驱动的故障预测方法不需要系统的先验知识,只需要利用历史数据和先进的智能算法建立预测模型,便可对当前部件进行故障预测。基于模型的预测方法在很大程度上依赖于物理系统领域的专业知识,模型通常表现出较弱的泛化能力[3],随着系统越来越复杂,基于模型的故障预测方法已经逐渐不再适用于PHM;与此同时,随着状态监测技术的发展,能获取的监测数据越来越多,数据驱动方法呈现出较强的适应能力,用于PHM技术的优势越来越明显,逐渐成为故障预测的主流方法。
故障预测的研究对象大多为时间序列数据,一般做法是对历史时序数据进行分析,从而获得未来数据的发展趋势。因此,对历史数据合理的记忆、提取和应用,成为时间序列数据预测效果优劣的关键。循环神经网络(Recurrent Neural Network, RNN)是一种以时间序列数据作为网络输入、在序列演进方向进行递归, 并将节点链式连接到深度神经网络。由于该网络可实现对历史数据的记忆功能,因此,被广泛应用在RUL预测领域。文献[5]将经验模式分解得到的能量熵作为RNN的输入,从而实现机械设备运行状态的预测。文献[6]将各
种特征相结合输入到RNN中实现滚动轴承的RUL预测,取得了很高的预测精度。尽管RNN在处理时间序列数据方面,提供了较好的解决方案,但是由于梯度消失问题的存在,导致RNN在实际应用中“记忆能力受限”,往往只能学习到网络短时间步长内的依赖关系[7]。
长短时记忆网络(Long Short-Term Memory,LSTM)基于RNN解决了随着时间的增加会发生梯度下降或者梯度爆炸的问题,进一步解决了获取长期记忆的问题,已被应用于工具磨损、燃料电池电压输出、锂离子电池单元容量和轴承健康状态等预测领域[7]。文献[8]对历史数据的特征进行优化提取,并利用LSTM网络模型实现了电池的RUL预测。文献[9]将一维卷积神经网络(Convolutional Neural Network,CNN)与LSTM相结合,在更好地学习锂离子电池老化规律的基础上实现了电池容量预测。文献[10]利用LSTM实现滚动轴承的RUL预测,并验证了基于LSTM的RUL预测方法比BP神经网络和支持回归向量机的预测方法更具有效性。文献[11]构建了一种基于多尺度排列熵和 LSTM的RUL预测模型,实现了设备退化过程的有效预测,并且达到了较好的实验效果。LSTM模型尽管对长序列学习模型效果较好,但是常用的单向LSTM模型输出往往受最后时刻状态的影响,序列开始部分的影响在长序列传播过程中趋于消失;同时,LSTM模型的构建方法是将“过去”的信息整合起来,然后辅助处理当前信息,然而大部分系统的性能退化过程实际上是一个在时间上具有前后依赖关系的连续变化过程,当前信息的处理也有必要整合“未来”的信息。
双向长短时记忆网络(Bi-Directional Long Short-Term Memory,Bi-LSTM)由前向LSTM和后向LSTM共同构成,前向LSTM获取输入序列的过去信息,后向LSTM获取输入序列的未来信息,实现过去和未来信息的充分利用。与LSTM网络相比,Bi-LSTM对强调顺序的数据表达能力更强[12]。文献[13]通过奇异值分解方法提取得到刀具磨损特征值,然后借助Bi-LSTM有效预测了刀具磨损情况。文献[14]提出一种基于Bi-LSTM的循环神经网络结构用于轴承的RUL预测,并通过设计接收随机长度样本的Bi-LSTM网络进行训练,进一步提升模型的泛化能力。文献[15]将一维CNN和Bi-LSTM相结合应用于航空发动机RUL预测,通过Bi-LSTM对性能退化量进行时间序列预测,得到性能退化的未来趋势,再通过设定性能退化阈值得到更准确的RUL预测结果。综上所述,Bi-LSTM能够较好地处理时序数据,并能有效地用于刀具、轴承、发动机等机械系统的故障预测,但其是否适用于电子装备的故障预测仍有待进一步验证。因此,本文提出基于Bi-LSTM的电子故障预测方法,验证了Bi-LSTM应用于电子装备故障预测有效性,且该方法提高了电子装备故障预测结果的准确性。
1 Bi-LSTM神经网络模型
1.1 长短时记忆网络(LSTM)
LSTM是RNN的变体,LSTM通过设置多个门结构,能同时记录长期和短期的信息,解决RNN模型训练过程中可能出现的梯度消失问题(即丢失前面的信息)。经典RNN模型和LSTM模型的结构如图2所示,可以看出,LSTM模型结构相比于经典RNN更为复杂。经典RNN单元中只有1个tanh激活函数,而LSTM单元中含有3种不同控制作用的门结构,分别是遗忘门、输入门和输出门,这些门结构用于学习一些有用的长期信息,放弃一些无意义的信息。LSTM常被用于语义分类、轨迹预测和动作分类等[16-17]。
图中,xt为输入序列,即用于故障预测的系统状态监测信息;ht为隐含层输出,即每个LSTM单元的学习结果;ft为遗忘门;it为输入门;Ot为输出门;
tanh为激活函数;
σ为sigmoid激活函数;W为权重矩阵;为点对乘积。
(1) 遗忘门:LSTM按照指定顺序处理时间序列数据,某时间段数据蕴含的信息中存在有用的,也有无用的。遗忘门的作用就是决定哪些信息进行保留,哪些信息直接忽略。遗忘门的输出为
式中:Wf为遗忘门的权重量;bf为遗忘门的偏置量。
(2) 输入门:信息经过遗忘门的取舍后进入到输入门中,输入门的作用是判断哪些参数需要进行更新,以及怎么更新。输入门的输出为
式中:Wi和WC分别为相应的权重;bi和bC分别为相应的偏置;Ct为当前的单元状态值。
(3) 输出门:信息经过遗忘门和输入门的筛选之后到达输出门,输出门的作用是决定输出哪些信息。输出门的输出为
式中:WO为输出门的权重量;bO为输出门的偏置;ht为当前单元的输出值。
LSTM的优点在于处理本单元信息时能够参考先前单元的信息,缺点在于没有参考后续单元的信息[16-17]。但对于某些问题,不仅跟先前单元信息有关,还跟后续单元信息有关,例如反映系统性能退化过程的状态参数,由于传感器采集过程中存在的观测不准确或数据不确定性等原因,先前时刻和后续时刻采集的参数均有助于确认当前时刻参数的准确性。于是,能够同时学习前向和后向数据规律的双向长短时记忆网络(Bi-LSTM)应运而生。
1.2 双向长短时记忆网络(Bi-LSTM)
Bi-LSTM是一种LSTM网络的变体,既能学习先前时刻的信息,也能学习未来时刻的信息[18]。Bi-LSTM通过同时向前和向后两方向的LSTM推算,一方面解决了LSTM推算中只考虑单向时序的问题,另一方面改善了LSTM推算中存在的权重受时序影响大的问题。Bi-LSTM网络结构[7]如图3所示。
Bi-LSTM的隐藏层会保存前向推算得到的向量h→和反向推断得到的向量h←,其计算方法都是基于单向LSTM:
Bi-LSTM中,h→和h←共同合并成最终输出结果:
2 基于Bi-LSTM的故障预测方法
在复杂系统中,系统状态很少能被直接观察到,需要通过传感器测量值X得到无量纲健康指数来表示系统状态Y。为了得到系统性能退化过程模型,本文提出基于Bi-LSTM实现系统性能状态跟踪的方法。
Bi-LSTM的输入[x(t-k), x(t-k+1), …, x(t)]代表系统性能状态[y(t-k), y(t-k+1), …, y(t)],Bi-LSTM的输出[y′(t-k+1), y′(t-k+2), …, y′(t+1)]是步进为1时的性能状态预测。通过比较预测状态值Y′和真实状态值Y,建立代价函数并用于Bi-LSTM网络的反向传播训练。在每次迭代中,其k个时间步长的输入数据由前一次迭代中的最后k-1个时间步长输入数据,以及前一次迭代输出的最后一个预测输出数据组成。例如,如果前一次迭代的输入是[y(t-k+1), y(t-k+2), …, y(t)],那么当前迭代的输入是[y(t-k+2), y(t-k+3), …, y(t), y′(t+1)],其中y′(t+1)为前一次迭代的最后一个输出。
设系统的故障阈值为Yf、工作时间为Ts时系统性能参数的累积退化量为Y(Ts),Y(Ts)<Yf时系统未故障,Y(Ts)≥Yf时系统故障。则Ts时系统的剩余寿命可表示为
根据PHM技术的基本流程,可得基于Bi-LSTM的电子装备故障预测方法步骤,具体如下:
(1) 状态监测数据采集,借助合适的传感器对电子装备工作过程中能够反映系统状态的参数进行监测采集,并记录;
(2) 退化特征参数提取,从采集的状态监测数据中提取能够反映系统性能变化趋势的特征参数,即健康度;
(3) 退化特性分析,对提取得到的退化特征参数进行分析,确认退化特征参数的变化趋势和演变规律;
(4) 退化过程模型建立,根据退化特征参数属性设置Bi-LSTM模型参数,并将退化特征参数输入Bi-LSTM模型中进行训练;