在轮子与脚之间
作者:三联生活周刊(文 / 吴戈)
 ( BLEEX则瞄准了为健康人行走助一臂之力
)
( BLEEX则瞄准了为健康人行走助一臂之力
)
对刚刚富了一代的中国人来说,有车族目睹车窗外无车族的辛苦,要让自己的虚荣心麻木下去,还真需要时间。同其他资源一样,中国城市交通空间正被加速消耗,但堵车和停车难还很难逆转人们拥抱汽车的步伐,高油价暂时也难敌享用小康的欢愉,甚至有84个城市连小排量汽车都不太欢迎。
从7月起,珠海市对上路的电动自行车实施处罚。到12月31日,北京市原有的电动自行车临时牌照将全部到期,据说从2006年1月1日开始所有电动自行车都将禁止在北京上路。似乎电动自行车是掺水的小康。
实际上,当一个孩子觉得用旱冰鞋或滑板去上学好玩又不累时,他也在创造一种交通工具。近年在洛杉矶,正风行一种站立行驶的两轮电动车Segway,虽然它未能带来问世时描绘的交通革命,但已经形成一种文化。苹果公司创始人之一史蒂夫·伍兹尼亚克和他的投资伙伴用Segway打马球的游戏正风行全美各地。Segway甚至赢得了洛杉矶黑帮的拥戴,他们为这种新坐骑也装上了耀眼的镀铬挡泥板。2004年2月,有人在洛杉矶首次完成了驾驶Segway的枪击案,杀死了人却没能逃脱,因为Segway最大速度只有20公里/小时。
“速可达”
Segway源于“速可达”(Scooter),起初只是摩托车的一种廉价结构样式,最早出现于二战后道路毁坏严重,经济困难的意大利,中国摩托车业俗称踏板车。1946年,皮亚齐奥公司的卡拉迪诺·迪斯卡里奥设计出L形车身,坐姿驾驶的踏板车“黄蜂”,在背景相似的日本,本田公司1952年研制的踏板车也迅速风靡。

踏板摩托车的优势在于机动和停车时占用空间分别不到汽车的50%和20%,适合在拥挤的城市使用。虽然摩托车从80年代起的超量发展带来了安全和环保方面的问题,但适应城市生活的短途个人交通工具永远有旺盛的需求。上世纪90年代末,由自行车延伸而来的电动(助力)自行车在中国盛极一时,产量从1998年的5.4万辆猛增到2003年的250多万辆。
为这一趋势推波助澜的是个性一代的时尚和休闲需求,任何带来速度和新鲜感的行驶工具都可能成为一种生活方式的符号。站在Segway的两个轮子上行云流水般滑过,改变了我们在城市中招摇的方式,没法不引来学生和街头少年的目光。
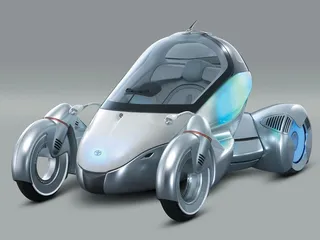
 ( 本田氢燃料电池车Hermes是瑞典设计师托米·福斯格伦的作品
)
( 本田氢燃料电池车Hermes是瑞典设计师托米·福斯格伦的作品
)
将儿童单脚踏板滑车和电动轮椅结合,美国人迪安·卡门首先研制出供残疾人使用的“独立”IBOT机动系统,这种能自动平衡的机动装置可以爬楼梯,越过沙地、石块和路沿。2001年12月3日,他的Segway LLC公司首次推出了靠蓄电池驱动的单人两轮车型Segway HT。2002年2月15日,该公司所在的新罕布什尔州第一个通过法案,允许EPAMD(电动个人辅助机动装置)在人行道上行驶,当年就有31个州通过类似法案。3月21日首批Segway生产型一下线,就被亚特兰大多家政府机构选用,受到邮政、治安机构、商场和仓库的欢迎,11月18日在亚马逊网站上首次对公众出售。2003年6月,美国总统小布什和几个弟兄为老布什买的父亲节礼物就是一辆“速可达”。到2004年3月,Segway HT i系列售价4495美元,p系列价格降至3995美元。11月16日一队美国用户还以16公里/小时的速度完成了Segway HT横跨美国大陆的行程。
Segway公司的市场负责人多戈·菲尔德说:“我们的目标不是要向人行道引进一种机动车辆,而是想使人们走出汽车。因此将它设计得能够置身于步行者之间。”对步行者而言,最大时速20公里的车辆并没有太大威胁。目前,美国已有36个州明确批准使用“速可达”,没有哪个州要求其作为机动车注册,只有10个州限制了骑行者最低年龄,9个州要求低龄骑行者要戴头盔,4个州规定了限速,其中特拉华州、伊利诺伊州和佛蒙特州为每小时13公里,佐治亚州为每小时11公里。当然也有个别城市对行驶范围做了限制,比如洛杉矶和旧金山禁止“速可达”在城市人行道上行驶,华盛顿禁止在地铁站使用,西雅图也准备禁止在部分城市公园和便道上使用,主要是出于对这些场所行人舒适性的照顾。
 ( Segway公司最近也推出了四轮电动车Centaur,越野能力更佳
)
( Segway公司最近也推出了四轮电动车Centaur,越野能力更佳
)
人车一体
作为为20年后设想的概念,丰田i-unit概念车的设计理念是“拓展人类的能力”,可以说是人体功能的自然延伸,目标是以最有效的方式完成个人的机动,释放个人行动空间。
 ( Tami Rhino是韩国的动力滑板
)
( Tami Rhino是韩国的动力滑板
)
i-unit的前身是2003年在东京车展上露面的PM(个人机动)单座电动车,近年已成为各地车展的明星。它采用电传操纵和侧面驾驶杆控制,比方向盘反应更加灵敏,车体高度和轴距根据上下车和不同速度驾驶的需要而自动调节,低速行驶时车体升高,驾车者视线几乎与站立时相同,可以轻松地在人群中穿行,高速时则自动降低重心,保持稳定,减少阻力。PM车身上的发光二极管能以不同颜色显示不同状态下的“情感”,多辆PM之间可以交流和共享信息,不光可以在堵车时相互引导路线,还能由一辆车带领编队自动行驶。
第二代车型i-unit首先在2005年3月的爱知世界博览会亮相,并参加了纽约和上海车展。i-unit车重180公斤,由锂离子电池通过后轮内的轮毂马达驱动,最小转弯半径0.9米。在外形上,i-unit比PM的豆荚形驾驶舱进一步收缩为极度紧凑的树叶形,车身长度可在1100〜1800毫米之间,高度可在1250〜1800毫米之间,轴距可在540〜1300毫米之间调节,宽度1040毫米,还能横向移动,使车辆几乎成为人身体的一部分,在简洁的同时,保证了充分的安全感和舒适性。
 ( Wheelman公司的动力滑板
)
( Wheelman公司的动力滑板
)
i-unit的释放还不光是体能,也是智能上的。它把车辆信息化提升到车际联网和互动的水平,驾驶者支持信息系统应用了丰田为无事故社会开发的智能运输系统(ITS)技术,利用声、光和振动来帮助人车互动交流,能在特殊车道上安全地自动驾驶,老年人和残障人士也能独立活动。它还进一步提高了个性化设计水平,能根据驾驶者的呼唤自动驶到驾驶者身边,驾驶者握杆后立即自动识别驾驶者身份,启动引擎,打开车灯,提供所需的信息和喜欢的音乐,并能根据驾驶者的喜好和情绪改变车身颜色。
行走交通
 ( 两轮电动车Segway
)
( 两轮电动车Segway
)
丰田公司的i-foot双足行走机器人代表了另一种交通理念。它高2360毫米,重200公斤,有12个自由度,载重量60公斤,行走速度1.35公里/小时,乘坐者在机器人蛋壳形的舱内用右侧的一个操纵杆控制,与鸟类似的脚可以向后弯曲,方便乘坐者上下,还能上下楼梯。
在此领域不遗余力的还有本田和索尼,2003年12月索尼甚至推出了能像人一样奔跑的双足机器人Qrio。以消费电子和娱乐业为主的索尼涉足行走机器人是为了公司形象,但本田就不一样,虽然也承认技术还不成熟,但本田相信最终能解决能量问题,打算在未来15年内推出实用化的产品。
 ( 丰田个人机动概念车
)
( 丰田个人机动概念车
)
机器人的行走虽然可以载人,更简洁的思路还是个人行走辅助,最早的方法也是类似蹦跳玩具的装置。较新的设计如俄罗斯乌法市立航空技术大学的教授诺曼·库里科夫发明的助跑鞋,重不到两磅,带有一个12英寸的活塞,活塞行程从地面直至小腿,跑步者的脚压下时活塞点火工作,使人的步幅增大到近4米,最高时速可以达到40公里,加满燃料后一次可以行走16公里。
2005年6月,日本筑波大学的吉行三介推出了HAL(复合辅助足),第一种原型HAL3包括穿在腿上的金属外骨架、背包内具有无线上网能力的计算机和腰带上的电池。贴在腿部皮肤上的生物电子传感器测到从大脑传到肌肉的运动信号后,计算机根据这个信号控制臀部和膝部的电动机,反应速度比使用者的肌肉还稍快一点。其他两种重要的传感器是用于测量使用者重心的地面反作用力传感器,以及测量大腿、膝盖和踝关节角度的传感器。
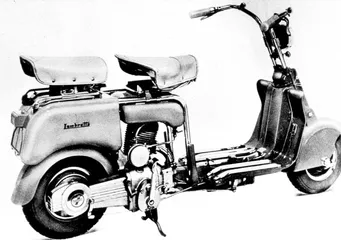 ( 意大利Lambretta早期踏板车Innocenti
)
( 意大利Lambretta早期踏板车Innocenti
)
与此同时,另一个系统在使用者第一次行走时就记录下运动的姿态和模式,存储到数据库里。当使用者再次行走时,计算机立即识别出这种运动,利用存储的运动模式提供助力。这两个系统的功能可以根据特定用户的需要加以校准,比如为更弱的腿提供更大的助力。
HAL3自重22公斤,但它提供的帮助远远抵消了这个重量,HAL4的自重将减到17公斤,HAL5可望更轻。后两种型号还将有帮助手臂运动的上半部分,可帮助使用者举起40公斤的重量,背包里的计算机和无线联网装置也缩小到腰带上的一个小包里,HAL5还大大缩小了臀部和膝部的电动机体积。HAL第一种生产型的价格将在14000〜19000美元之间,年底就可进入市场,首先迫切需要HAL的领域是大脑和脊柱受伤者的康复。
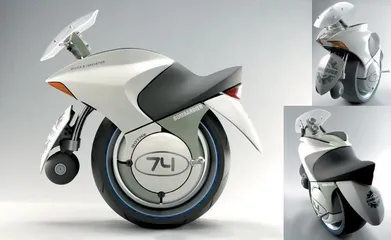 ( Embrio单轮概念车 )
( Embrio单轮概念车 )
加州大学伯克利分校Homayoon Kazerooni设计的BLEEX(伯克利下肢骨架)则瞄准了为健康人行走助一臂之力。这套装置重40.9公斤,包括一对腿部助力结构和背架,背架中装有一个1加仑的油箱和汽油机,为运动部件提供液压能量,也为传感器和计算机部件提供电源。整个装置不需要键盘、操纵杆之类,因为人本身就是这套装置的一部分。40多个传感器能精确测量人腿的运动趋势,背包内的中央处理器利用步态分析和控制算法计算出人的运动,瞬间控制助力部件配合,完全适应人的重量分布和运动幅度,使人可以背负34公斤的重量如履平地,今后两年内还能学会下蹲和上楼梯,只是目前的速度还不太理想,每秒钟可走两步。BLEEX的研究是由国防先进研究计划局(DAPRA)资助的,2005年底还将推出更快、更轻、更灵活的BLEEX2。
然而,按多数机器人专家的看法,行走和奔跑对机器人而言可能是最低效,最消耗能量的运动方式。楼梯的定势已经被打破,履带式机器人已经能以满意的速度上下楼梯。即使对做家务而言,两条腿也并没有实质用处,相反它降低了功能和可靠性,增加了成本。双足机器人需要不断调整全身的动作,才能保持平衡,哪怕只是拿一个茶杯,也会改变它的重心,需要消耗大量能量,部件的磨损也会非常大,行走时克服障碍和绊倒后恢复站立也都是问题。
两足机器人也在取得进展,比如平衡软件要计算随时保持稳定需要的力和位置,机器人必须随时与地面保持接触,现在索尼的Qrio在奔跑时双足都能离开地面而不会破坏稳定。其实行走需要连续地控制,而奔跑在原理上反而简单一些,因为更大的向前动量能帮助保持稳定。美国麻省理工学院的行走实验室也研究出让奔跑的机器人适应崎岖地面的方法,发现使机器人的脚在接地时向后运动,能大大改善稳定性。
把硬币立起来
Segway 独特的动态稳定技术与人体的平衡能力相似,5个便宜的固态陀螺仪、倾斜传感器、高速微处理器和电动机每秒100次监测车体姿态,测出驾驶者的重心,瞬间完成计算,以每秒20000次的频率进行细微调整,不管什么状态和地形都能自动保持平衡。它的运动也与人保持平衡的本能反应相同,没有油门和刹车,身体前倾则向前运动,后倾则后退,直立则停下,转向则通过旋转两个手腕下方的操纵把手来完成。之所以不用四轮来降低成本和复杂性,原因在于要考虑崎岖地形,四轮车的重心一旦落在一个轮子以外就会翻车,为此轮子不得不分得很开,增加了地面投影面积,有悖“速可达”小巧的初衷。
最轻便的SegwayHT p133最大速度16公里/小时,自重32公斤,载重95.3公斤,地面投影面积仅41×55厘米,两块48单元镍金属电池组能行驶9.7〜16公里,充电需要4〜6小时,适于平坦、拥挤的步行区,可带上火车或地铁,方便出差、上课和上班,可轻松推上楼梯。
为保证安全,Segway的最大速度和转弯速度可根据驾驶者的不同水平设置,使用黑色的初学者钥匙,最大速度只能达到9.6公里/小时,使用黄色的中级钥匙,可达到12.9公里/小时,使用红色的高级钥匙,就可以达到20公里/小时。
Segway的能耗相当于724公里/加仑,每英里比汽车节省0.36美元。美国城市地区平均有33%的日常交通会发生堵塞,每个驾车者每年因堵车浪费36小时。美国人每天要驾车9亿人次,估计其中有一半是不到8公里的单人驾车。如果这4.5亿次驾车平均距离为4.8公里,以汽车在城区平均油耗9公里/升,就有2.36亿升,如果其中只有10%被代替,每年可省油85.9亿升。
另一类机动“速可达”因为采用三轮布局,成本要低得多。比如“捕食者”SE Jet“速可达”装一台43cc两冲程汽油机,采用链式传动和一升油箱,自重18公斤,最大载重量159公斤,速度为40〜56公里/小时,折叠起来只有1.1×0.4×0.3米。美国Xootr公司的EX3,最高速度可以达到27公里/小时,重不到8公斤,充电一次可行驶10公里,使用大容量电池可行驶20公里,售价899美元(大容量电池型1098美元)。难怪Segway的动态稳定技术会被人批评为“为形式牺牲了经济性”。
Segway的技术一出现,也引起了各大机器人实验室的骚动,它使机器人不再是《星球大战》中R2D2垃圾桶一般的矮胖模样。首批客户包括美国国防部先进研究计划局,2003年2月该局购买了15辆Segway HT,改装成RMP(自主机动平台),用于各机器人实验室的机器人项目。
很多观察家都相信机器人下一步的工作环境主要在人身边,比如帮助照顾老人,从老龄化明显的日本在这一领域的投入就可见一斑。麻省理工学院计算机科学与人工智能实验室主任罗德尼·布鲁克斯说:“如果你将机器人置于为人设计的环境里工作,当然高一些、瘦一些比较好,但这需要掌握平衡。”
南加州大学机器人专家安德鲁·霍华德则将Segway机器人用于勘测城市地形,特别是废墟。在洛杉矶消防局训练场,他的机器人在扭曲的钢筋水泥丛林中行走,用每秒测量数千个点的激光测距仪绘制精确的三维地图。亚特兰大的佐治亚技术学院的Ron Arkin机器人则能用激光测距仪每1/4秒测量一次前方的平整度,然后根据地面崎岖度决定加减速。这并不简单,因为测距仪本身也在不断俯仰和倾斜,它还要同时测量机器人的倾斜,修正数据。这套系统非常灵敏,但也过于拘谨,看到树叶形成的不平坦也会减速。■